Все материалы по квадрокоптерам
Внезапно настала зима, с дальнейшими запусками собранного квадрокоптера возник напряг, и видимо продлится он до весны. Пока же можно обсудить, как вообще происходит управление квадрокоптерами.
ANGLE или STAB
Так называется основной режим полёта, который вы встретите в 99% бытовых дронов. Он предназначен для широких масс пользователей, включая новичков. Собственно, STAB означает "стабилизация", то есть коптер сам себя стабилизирует, чтобы находиться в горизонтальном положении. (Вы можете встретить ещё режим HORIZON, то есть "горизонт", и подумать, что это то же самое, но нет, это не то).
Но почему тогда он называется также ANGLE (точнее сказать, это его основное название)?
Когда вы наклоняете стик на пульте вперёд, коптер тоже летит вперёд. Когда наклоняете назад – летит назад. Так же и вправо и влево. Это вроде бы понятно. Но физика полёта коптера такова, что лететь в какую-либо сторону он может только наклонившись в эту сторону.
Таким образом всё, что вы на самом деле делаете, это управляете углом наклона коптера с помощью такого же угла наклона стика. Поэтому режим и называется ANGLE.

Здесь есть один нюанс. Когда коптер висит горизонтально, вектор тяги направлен вертикально вверх. У него есть только вертикальная скорость. Когда коптер наклоняется, то вектор становится диагональным и появляется горизонтальная скорость.
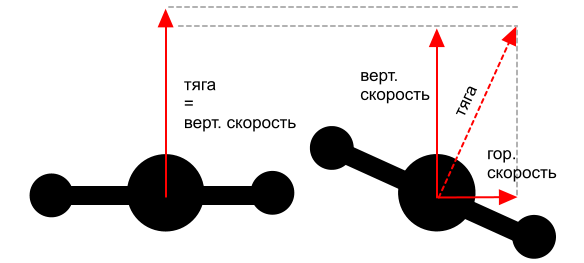
Но как можно видеть, вертикальная скорость одновременно уменьшается. Наклонившись, коптер начинает лететь вбок, но при этом ещё и снижаться. Чтобы этого не происходило, нужно увеличивать тягу. Всё это в режиме ANGLE делается автоматически, то есть пилоту нужно просто наклонять стик в ту сторону, в которую он хочет лететь. (Данное предположение требует дополнительной проверки.)
ACRO
Режим называется так от слова "акробатика". В нём летают FPV-пилоты, и если новичок способен с первого раза поднять коптер и летать в режиме ANGLE, то в ACRO он гарантированно разобьётся.
Физика здесь, конечно же, работает точно так же. Чтобы куда-то лететь, нужно наклонять коптер.
Но когда вы наклоняете стик, вы задаёте не угол наклона коптера, а скорость его вращения в градусах в секунду.
Условно говоря, если вы наклонили стик на 30 градусов в режиме ANGLE, вы даёте команду коптеру наклониться на 30 градусов. Если вы наклонили стик на 30 градусов в режиме ACRO, вы даёте коптеру команду вращаться со скоростью 300 градусов в секунду.
Пока вы держите стик наклонённым в режиме ANGLE, коптер также постоянно наклонён и летит в соответствующую сторону. Когда вы выровняли стик, коптер тоже выравнивается.
Пока вы держите стик наклонённым в режиме ACRO, коптер вращается с заданной скоростью в нужную сторону. То есть да, он тоже наклоняется, но он делает это непрерывно.
Когда вы выравниваете стик, коптер не выравнивается, а просто перестаёт вращаться. В каком положении он был, когда перестал вращаться, в таком и остаётся.
Поэтому, чтобы например лететь вперёд в режиме ANGLE, вы должны всё время удерживать стик наклонённым, а в режиме ACRO вы должны наклонить стик, подождать, пока коптер повернётся на нужный угол, и затем отпустить стик. Коптер останется наклонённым. При этом вам нужно будет ещё и вручную регулировать тягу, чтобы коптер не начал снижаться. Это самый ручной режим из возможных.
Чтобы выровнять коптер горизонтально, в режиме ANGLE достаточно отпустить стик. А в режиме ACRO нужно наклонить стик в обратную сторону и подождать, когда коптер выровняется, после чего отпустить стик.
Образно выражаясь, управление ANGLE происходит в пространстве, а ACRO во времени.
Что значит "подождать"? Сколько это времени? Это зависит от скорости вращения коптера. Если вы отклонили стик едва-едва, то коптер будет вращаться довольно медленно. При полном отклонении стика скорость вращения будет такая высокая, что коптер совершит несколько полных оборотов ещё до того, как вы успеете что-то сообразить.
Именно поэтому данный режим называется "акробатическим". В нём вы можете заставлять коптер совершать кувырки и сальто. Но для этого нужны долгие и упорные тренировки.
Как начать летать в ACRO
Одна из самых вредных привычек, которую нужно победить, это отклонение стиков до упора. Оно характерно для режима ANGLE: мы просто отклоняем стик, будто давим на педаль газа, и коптер летит.
Но если так сделать в режиме ACRO, то коптер просто закрутится как волчок и упадёт.
Начать летать можно без видеоочков, просто наблюдая за коптером со стороны.
Если работать стиком очень аккуратно, совершая очень короткие движения, то можно будет видеть, как коптер слегка наклоняется в ту или другую сторону. Чтобы поправить его положение, вы просто нажимаете стик таким же коротким движением в противоположную сторону.
Это сможет сделать даже новичок, но проблема в том, что как только вы немного запутались, у вас включаются рефлексы и вы начинаете давить на стики в полную силу. Что закономерно приводит к аварии. Поэтому самое первое – привыкнуть не совершать широких движений стиками.
Вторая проблема – параллельно удерживать нужную высоту, манипулируя тягой. Это достаточно сложно и требует наверно даже больше усилий.
Далее можно перейти к полётам в очках. Но сначала лучше воспользоваться программными симуляторами полётов. Есть разные программы, такие как Velocidrone и LiftOff. Они довольно близко воспроизводят управление в режиме ACRO и сэкономят вам громадное количество времени и разбитых или потерянных коптеров.
После того, как вы научитесь летать в симуляторе, можно сказать, что реальный полёт вы сможете успешно осуществить с нескольких попыток.