Многогранность человеческой руки, способной взять практически все, отчасти связана с возможностью нежно прикасаться к хрупким или странной формы предметам. Это то, с чем роботы сталкиваются с трудом, особенно при автономном функционировании, и, к сожалению, решение может заключаться в неортодоксальной конструкции захвата, которая выглядит прямо как из фильма ужасов.
Исследователи из Гарвардской школы инженерии и прикладных наук Джона А. Полсона представили свою новую конструкцию захвата в преддверии Хэллоуина, поскольку она черпает вдохновение в причудливых морских существах, таких как осьминоги и медузы, которые используют группы длинных щупалец и нитей для захвата и наматывания добычи на крючок. Гигантский кальмар давно стал загадочным существом из океанских легенд, так почему бы не воссоздать его в лабораторных условиях?
Вдохновение животными для создания роботов, предназначенных для выполнения конкретной задачи, - далеко не новая идея. Человеческая рука может быть невероятно ловкой, но ее способности также невероятно трудно воспроизвести роботу. Щупальца, с другой стороны, таковыми не являются, и именно их простота является ключом к тому, как работает эта конструкция захвата.

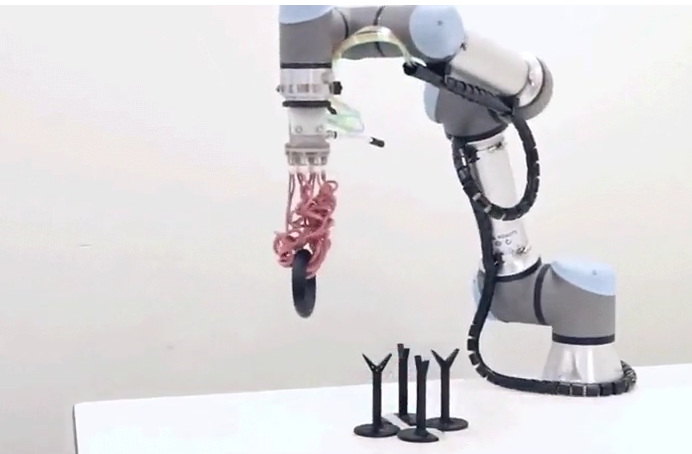
Искусственные щупальца сделаны из полых резиновых трубок длиной в 30 см, одна сторона которых немного толще другой. В пустом состоянии они становятся вялыми и кажутся безжизненными, свисая, как прямые волосы, но когда в них накачивается воздух, они оказываются под давлением и скручиваются, как косичка. Действие скручивания более или менее совершенно случайно, так что если вы положите какой-нибудь предмет рядом с одним из щупалец, когда оно скручивается под давлением, есть шанс, что оно обернется вокруг него, и есть шанс, что нет. Но если поместить предмет рядом с большой группой таких щупалец, то практически гарантировано, что по крайней мере несколько из них будут обвиваться вокруг предмета по мере его скручивания, а также друг вокруг друга, и чем больше таких сплетений происходит, тем сильнее становится захват.
В совокупности группа щупалец обеспечивает сильную фиксацию объекта, но по отдельности каждое щупальце имеет относительно слабый захват, что означает небольшой риск повреждения хрупкого объекта в процессе. А поскольку щупальца обеспечивают надежную фиксацию только тогда, когда в них накачан воздух, простое ослабление давления также приведет к освобождению удерживаемого предмета.
Исследователи считают, что новая конструкция захвата может стать эффективной альтернативой тому, что используется сегодня для работы с любыми предметами - от растений, фруктов и овощей до даже хрупкой стеклянной посуды. Тем не менее, конструкция все еще имеет некоторые проблемы, которые необходимо решить, прежде чем что-то подобное появится на заводах или складах. Случайный характер переплетений означает, что поднятые объекты нельзя опустить обратно с той же точностью и аккуратностью, что и вакуумные захваты, используемые сегодня для работы с хрупкими объектами, что представляет собой большую проблему для автоматизированных задач, таких как упаковка или подготовка деталей к следующему этапу на автоматизированной сборочной линии.
Спасибо за просмотр!
Если вам была полезна данная статья, то подписывайтесь на канал и ставьте лайки, это помогает в продвижении канала и мотивирует делать новый контент!