
Вы боитесь доверить свою жизнь самоуправляемому автомобилю? А что, если бы вы могли телепатически общаться с автомобилем и мгновенно сообщать ему, если он совершит ошибку?
Таково конечное обещание технологии, разработанной командой из Бостонского университета и Лаборатории компьютерных наук и искусственного интеллекта (CSAIL) Массачусетского технологического института. Технология использует сигналы мозга для автоматического исправления ошибок робота.
Использование так называемого интерфейса мозг-компьютер (BCI) для общения с роботом не является чем-то новым, но большинство методов требуют, чтобы люди тренировались с BCI и даже учились модулировать свои мысли, чтобы помочь машине понять их, говорят исследователи.
Опираясь на сигналы мозга, называемые "потенциалами, связанными с ошибками" (ErrPs), которые возникают автоматически, когда человек совершает ошибку или видит, как ее совершает кто-то другой, подход исследователей позволяет даже полным новичкам управлять роботом с помощью своего разума, говорят авторы нового исследования. Это можно сделать, просто соглашаясь или не соглашаясь с любыми действиями робота, говорят исследователи.
Работа с машинами
Эта технология может предложить интуитивно понятный и мгновенный способ общения с машинами, который может применяться в самых разных областях, от управления заводскими роботами до управления роботизированными протезами, говорят исследователи.
"Когда люди и роботы работают вместе, вам приходится учить язык робота, осваивать новый способ общения с ним, адаптироваться к его интерфейсу"
- сказал Джозеф ДельПрето, кандидат наук в CSAIL, работавший над проектом.
"В этой работе нам было интересно посмотреть, как можно сделать так, чтобы робот адаптировался к нам, а не наоборот"
- сказал он в интервью Live Science.
Новое исследование было опубликовано онлайн в понедельник (6 марта) и будет представлено на Международной конференции по робототехнике и автоматизации IEEE (ICRA) в Сингапуре в мае этого года.
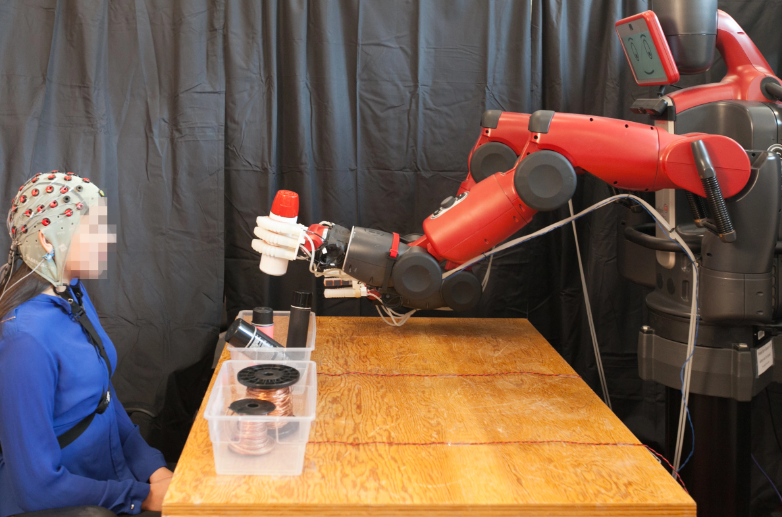
В исследовании ученые описали, как они собирали данные электроэнцефалографии (ЭЭГ) у добровольцев, наблюдая за тем, как промышленный человекоподобный робот обычного типа под названием Бакстер решает, какой из двух предметов взять.
Эти данные были проанализированы с помощью алгоритмов машинного обучения, которые могут обнаружить ошибки всего за 10-30 миллисекунд. Это означает, что результаты могут быть переданы роботу в режиме реального времени, что позволит ему скорректировать свой курс на середине пути, говорят исследователи.
Совершенствование системы
По признанию команды, точность системы нуждается в значительном улучшении. В экспериментах в реальном времени бот показал результат лишь немного лучше, чем 50/50, или случайность, при классификации сигналов мозга как ErrPs. Это означало, что почти в половине случаев он не замечал поправки наблюдателя.
И даже при более неторопливом, автономном анализе система все равно оказывалась права лишь в 65 процентах случаев, говорят исследователи.
Но когда машина пропускала сигнал ErrP и не корректировала свой курс (или меняла курс при отсутствии ErrP), человек-наблюдатель обычно выдавал второй, более сильный сигнал ErrP, говорит научный сотрудник CSAIL Стефани Гил.
"Когда мы проанализировали это в автономном режиме, мы обнаружили, что производительность значительно увеличивается, до 86 процентов, и мы предполагаем, что в будущем мы сможем увеличить этот показатель до 90 процентов. Поэтому следующим нашим шагом будет обнаружение таких сигналов в реальном времени и приближение к нашей цели - точному и надежному управлению этими роботами на лету"
- рассказала Гил в интервью Live Science.
Однако сделать это будет непросто, потому что системе необходимо сообщить, когда следует обратить внимание на сигнал ErrP, сказали исследователи. В настоящее время для этого используется механический переключатель, который активируется, когда рука робота начинает двигаться.
Вторичная ошибка возникает только после того, как рука робота уже движется, поэтому этот переключатель не сможет дать сигнал системе искать ErrP, говорят исследователи. Это означает, что систему придется перепроектировать, чтобы обеспечить другой сигнал, добавили они.
Что теперь?
Исследование хорошо написано, говорит Клаус-Роберт Мюллер, профессор Берлинского технического университета, который не участвовал в новом исследовании, но также работал над BCI, использующими эти сигналы ошибок.
Однако, по его словам, использование ErrP для управления машинами не является чем-то особенно новым, и он также выражает обеспокоенность по поводу низкого коэффициента классификации ErrP, которого добилась группа.
Хосе дель Р. Миллан, доцент Федеральной политехнической школы Лозанны в Швейцарии, сказал, что он согласен с тем, что производительность декодера ErrP группы была низкой. Но он считает, что примененный ими подход "очень перспективен", добавил он.
Группа Миллана использовала сигналы ErrP для обучения роботизированного манипулятора наилучшему способу перемещения в заданное место. В исследовании, опубликованном в 2015 году в журнале Scientific Reports, Миллан и его коллеги описали, как рука в их работе начинает со случайного движения, которое человек-наблюдатель считает правильным или неправильным.
С помощью подхода машинного обучения, называемого обучением с подкреплением, сигналы об ошибках используются для точной настройки подхода робота, позволяя ему выработать наилучшую стратегию движения к конкретной цели. Миллан говорит, что использование ErrP для управления роботами может иметь широкое применение в будущем.
"Я вижу его применение в любом сложном человеко-машинном взаимодействии, где большая часть нагрузки ложится на машину, поскольку она способна выполнять задачи почти автономно, а человек просто контролирует"
- сказал он.