С быстрой разработкой информационных технологий, различные отрасли предпринимают более высокие и более высокие требования к чипам, такие как высокая скорость, наноразмерный ультраумный размер, низкое энергопотребление, низкая задержка и т. Д., И эти требования выдвинули более высокие требования для производительности и точность микроэлектронного производственного оборудования.
Процесс производственного оборудования для микроэлектроники
Процесс производства микроэлектроники очень сложный, начиная с сырья и проходя много сложных шагов, чтобы получить конечный чип, который можно использовать. Общий процесс заключается в следующем:
1. Процесс добавления
1.1 Допинг (диффузия, ионная имплантация)
Соответствующее оборудование: диффузионная печь, ионная машина для имплантации, отжигающая печь.
1.2 Тонкие пленки (окисление, химическое осаждение паров, распыление, эпитаксия)
Соответствующее оборудование: окисляющая печь, реактор сердечно -сосудистых заболеваний, аппетитная машина для покрытия, эпитаксиальное оборудование.
2. Процесс разведения
Травление (влажное травление, сухое травление)
Соответствующее оборудование: машина с влажным травлением, реактивный ионный травление.
3. Процесс вызора
Полировка и очистка (химическая механическая сглаживание, очистка)
Соответствующее оборудование: полировка CMP, кремниевая очистка пластин.
4. Графический процесс переноса
Графический трансфер (литография)
Соответствующее оборудование: литографическая машина, оборудование для разработки с покрытием клей
5. Разлучный процесс
Тестирование и инкапсуляция (тестирование, инкапсуляция)
Соответствующее оборудование: тестовое оборудование, машина для расписки, склеивание
Самый сложный процесс - литография.
Фотолитография изготовление - это процесс передачи рисунка из макета или маски на поверхность полупроводниковой пластины с помощью легких волн. Этот процесс является самой сложной стадией в производственном процессе интегрированных цепей. Литографическая машина является самым сложным оборудованием в мире, и есть только несколько производителей.
Литографическая машина также называется машиной для выравнивания маски, системой экспозиции, литографической системой и т. Д. Литографический процесс, как правило, делится на 8 основных этапов: пленка с воздушным покрытием, ротационное покрытие, мягкое сушка, выравнивание и экспозиция, выпекание после воздействия, развитие, развитие, Выпечка сплошной пленки, развитие проверки. Выравнивание и экспозиция выполняются в литографическом инструменте. Другие процессы проводятся на разработчике с покрытием клея (трек).
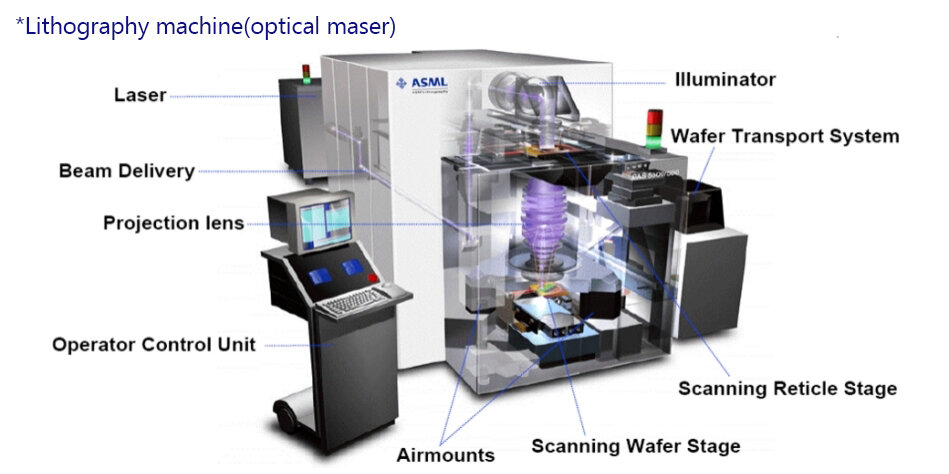
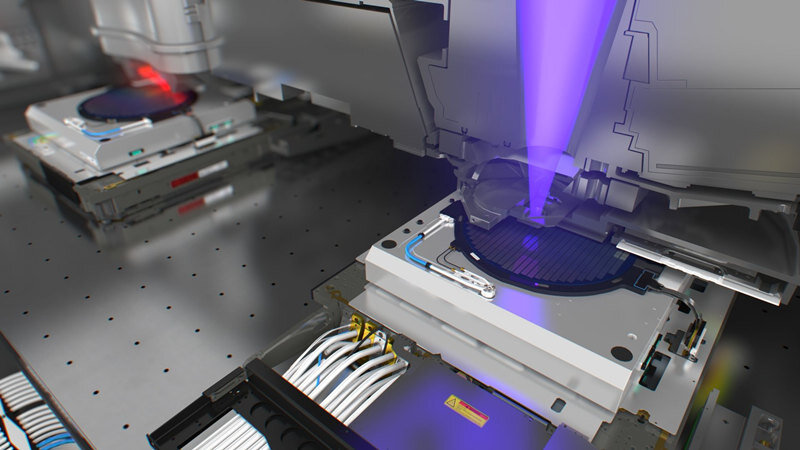
Есть две важные рабочие платформы в процессе выравнивания и экспозиции литографической машины. Одним из них является платформа заготовки, которая используется для переноса кремниевых пластин, а именно пластин. Другой - это этап маски, которая используется для переноса маскируемой пластины или маски на короткое время. Маска носит рисунок дизайна, и свет, сияющий сквозь маску на пластинку Источник света должен быть проверен через несколько зеркал для окончательного спектра, через маску, а затем через проекционную цель, которая имеет несколько линз, включая движущиеся зеркала, чтобы настроить аберрацию.
Применение пьезо нано движения продуктов в литографической машине
Поскольку размер интегрированных цепей становится меньше и меньше, аберрации объектива литографической проекции оказывают все большее и большее влияние на качество изображения. Тем не менее, аберрации, такие как астигматизм, сферическая аберрация и искажения, могут быть компенсированы в режиме реального времени, используя продукты пьезо нано движения в качестве источника вождения объективного объектива.
I) CoreMorrow N31 Линейный пьезовый двигатель используется для высокой точной настройки проекционной цели
Гибкая платформа пьезо нанопозиции типа шарнира, произведенная Coremorrow, имеет точность до нанометра или даже уровня субнанометра, а верхний предел смещения может составлять до 1 мм.
Линейный пьезовый двигатель, произведенный Coremorrow, может не только соответствовать требованиям к путешествиям до 100 мм, но и обеспечить соответствующую точность позиционирования нано-уровня, такую как Coremorrow N31 Линейный пьезовый двигатель, может обеспечить большой диапазон, но также обеспечить высокую рецепту регулирование движения.
Пошаговый привод принят для обеспечения большого хода, точности нанометра и большой мощности
CoreMorrow N31 Линейный пьезовый двигатель схож из -за шагающего движения, его интерьер содержит больше групп пьезоататоров, каждый шаг выполняется двумя парами пьезо приводов, и каждая пьезоататоры, контролируемые сигналом напряжения. Удлинение и сокращение между каждой парой координации движения пьезоазора контролируют рычаг среднего сдвига вперед или назад.
Инкрементный энкодер обеспечивает высокий контроль точного положения
Линейный пьезовый двигатель N31 имеет встроенный оптический энкодер безконтактного оптического энкодера, простая структура высокого разрешения, небольшой объем, для платформы пьезо двигателя, чтобы обеспечить высокое точное движение и не влияя на механическое действие, упругая деформация и так далее.
II) Coremorrow Piezo Hexapod Параллельный механизм используется в литографической машине для регулировки наклона и положения пластины или объективного объектива
Ядро завтра шесть организационной платформы для свободы и кондиционирования отличается от общего параллельного механизма оси. Корректировка обеспечивает ультра -высокую точность позиционирования, которая может использоваться для устранения теплового искажения материала зеркала, вызванного лазерной энергией и т. Д., И компенсировать качество объекта.
Шесть штуковинов Coremorrow H60 Parallel Mechanism - все это пьезо. Шесть пьезо приводов соединены параллельно, а приводы сотрудничают друг с другом, чтобы контролировать наклон или линейное движение движущейся поверхности верхнего конца. Этот вид структуры не имеет накопления ошибок, небольших ошибок и высокой точности.
Платформа параллельного механизма H60 H60 контролируется верхним компьютерным программным обеспечением и предоставляет процедуры VC ++, MATLAB, LabView.
III) CoreMorrow Промотор поперечного электричества используется для мелкого покрытия модели и положения
Таблица заготовки и таблица маски в основном состоит из трех частей: механическая структура, измерение и управление. Закрытый цикл образуется между таблицей заготовки, таблицей маски, структурой передачи и датчиком положения, чтобы завершить точное выравнивание между таблицей заготовки и таблицей масок. Этот процесс требует, чтобы движение таблицы маски и таблицы заготовки сохраняло точное выравнивание, в противном случае оно приведет к смещению позиции визуализации, что повлияет на точность конечной графики.
Следовательно, целевая проекция с четырехкратным уменьшением увеличения обычно принимается, что может значительно снизить влияние дефектов маски на качество изображения. Но в то же время скорость движения таблицы маски должна быть в 4 раза быстрее, чем в таблице заготовки. Это требует, чтобы часть движущейся машины имела характеристики высокой скорости и высокой точности.
Линейный пьезовый привод Coremorrow имеет характеристики небольшого размера, быстрой скорости отклика, высокой точностью, большой мощности и т. Д., что может соответствовать требованиям высокой скорости и высокой точностью в выравнивании маски.
Например, диапазон ходков пьезо привода CoreMorrow VS12 составляет от 9 до 152 мкм, вывод до 1200N, фиксированный конец и мобильный конец подключены механическим интерфейсом (плоская головка, внутренняя нить, внешняя нить, шаровая головка, пользовательский и т. Д.). Он принимает пьезой керамический прямой привод, со способностью быстрого ответа на миллисекунд. Быстрая и высокая точная выравнивание маски может быть достигнуто посредством координации нескольких пьезо приводов.
В процессе экспозиции, из -за движения таблицы маски, также будет иметь большую инерционную силу, которая приведет к скольжению таблицы маски, что приведет к снижению точности. Чтобы компенсировать неконтролируемую вибрацию или отклонение положения, также необходимо регулировать часть движущейся машины с высокой скоростью и высокой точностью, а также координировать с датчиком положения.
IV) Coremorrow Пьезо приводы используются для отмены инерции и подавления активной вибрации
Из -за высокой скорости регулировки стола заготовки и таблицы маски в литографической машине будет генерироваться инерция, которая вызовет вибрацию таблицы и оказывает неблагоприятное влияние на литографию.
Чтобы устранить вибрацию таблицы, обычно принимается активное подавление вибрации.
Coremorrow предоставляет различные пьезоализации и зондирования для различных структур. Одним из них является интеграция пьезоализации и зондирования, то есть часть приведения и восприятия объединяются в одноцелевую пьезой керамику. Вибрация и сила структуры обнаруживаются через пьезорезоционную часть, и данные обнаружения подаются обратно, а затем напряжение, применяемое к действующей части , чтобы отменить вибрацию. Структура Workbench показана ниже.
Кроме того, Coremorrow Incapsulated Piezo Actuator также является хорошим выбором. Он имеет характеристики высокочастотной, высокой отклики, большой мощности и небольшого объема, что очень подходит для применений в уменьшении вибрации и подавления в фотоэнергеров. Когда сигнал вибрации или отклонения положения обнаруживается датчиком, он возвращается обратно к контроллеру пьезое или внешнему блоку управления, а затем сигнал управляющего напряжения, применяемый пьезо -контроллером к инкапсулированному пьезово производит силу, противоположную направлению вибрации, чтобы отменить вибрацию, генерируемую таблицей.
CoreMorrow Вклад пьезоэлектрического керамического промотора может достигать 50 кН, а скорость отклика может достигать уровня миллисекундов, что может быстро и точно компенсировать вибрацию рабочей зоны.
V) Датчик емкости Coremorrow используется в литографических машинах для обнаружения положения или вибрации
Отклонение или вибрация таблицы заготовки, таблицы маски и объективной линзы в литографической машине должны быть обнаружены датчиком, а датчик емкости широко используется в литографической машине из -за его простой структуры, высокой точности и небольшого объема.
Датчик емкости Coremorrow в настоящее время продается с различными диапазонами, после фактического теста разрешение может составлять до 1,25 нм, -3db полосы пропускания до 2 кГц, линейность до 0,05%, повторение до 0,0025%.
Датчик емкости Coremorrow основан на идеальном принципе конденсатора параллельных пластин, датчике и противоположной поверхности измеренной цели с образованием двух электродов. Принцип защитного кольцевого конденсатора гарантирует, что датчик по -прежнему является линейным при измерении какого -либо металла.
Датчик емкости Coremorrow оснащен модулем сбора сигнала, который преобразует значение емкости между датчиком емкости и измеренной поверхностью в значение напряжения через внутреннюю схему. Диапазон выходного напряжения составляет 0 ~ 10 В, а выходной диапазон является линейным с датчиком емкости от 0 до максимального диапазона.
Датчик емкости очень подходит для обнаружения вибрации таблицы, таблицы маски и объективной линзы. Он имеет три диапазона 100 мкМ, 200 мкм и 500 мкм, а его статическое разрешение обнаружения составляет 1,25 нм, 2,5 нм и 5 нм соответственно. Его внешний диаметр составляет всего φ10 мм, а небольшой размер легко интегрировать.
Вывод
Продукты Piezo Nanomotion используются в сверхвысоких точных инструментах, таких как литографические машины, из-за его быстрого отклика и высокой точности. В дополнение к вышеуказанным применениям, к литографическим машинам можно применять много пьезо-наномоции, такие как пьезо-фазовый переключатель для перемещаемого зеркального фазового сдвига, пьезоиспа Эксцентрическое выравнивание объективной линзы, пьезой керамики для зондирования и приводов ... и т. Д., Это связано с конкретной структурой литографической машины и принятыми оптическими компонентами.
Кроме того, Coremorrow также может настроить большую нагрузочную подшипку, большой стадию пьезо нано осевой отверстия, используемой для регулировки объективного положения и регулировки наклона; Интегрированная система стадии позиционирования пьезо нано и датчика обнаружения вибрации также может быть настроена для интеграции движения обнаружения и восстановления вибрации.
Coremorrow была посвящена технологии Piezo Nano Motion and Control в течение 15 лет, предоставляя клиентам бесчисленные решения.
Добро пожаловать, чтобы связаться с нами для любых программ корректировки высокой точной позиции, мы предоставим конкретные решения с высокой адаптацией в соответствии с вашим приложением.