...мы написали о том, как человекоподобного робота научили кататься на скейте и роликовых коньках. Рубрика #таймхоп
Японские инженеры научили двуногого человекоподобного робота сохранять равновесие, передвигаясь на скейтборде и роликовых коньках. Разработка была представлена на конференции IROS 2018.
При создании сухопутных роботов можно выделить два крупных направления со своими достоинствами и недостатками — колесные и ходячие роботы. Колесные роботы имеют значительное преимущество в скорости, а ходячие способны преодолевать препятствия, такие как лестницы или завалы. Некоторые разработчики пытаются совместить оба типа движений и создают двуногих или четвероногих роботов с колесами. Однако практически во всех этих проектах применяются активные колеса с моторами, благодаря чему во многих случаях для поддержания баланса им достаточно лишь управлять вращением моторов в колесах.
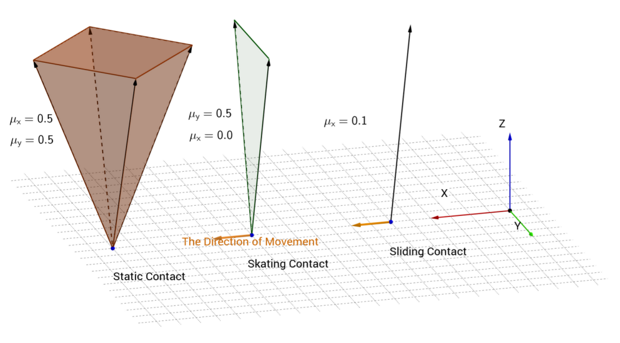
Инженеры из Токийского университета под руководством Масаюки Инабы (Masayuki Inaba) решили гораздо более сложную задачу и научили двуногого робота двигаться на устройствах с пассивными колесами, таких как скейтборд и роликовые коньки. Эта задача отличается не только от управления активными колесами, но и от обычной ходьбы, потому что во время обычной ходьбы при постановке ноги робот может поставить ее под некоторым диапазоном углов, находящихся внутри конуса, ширина которого зависит от трения между ногой и поверхностью. Если угол постановки ноги лежит внутри этого конуса, то контакт будет стабильным. В случае с ездой на скейтборде или коньках трение в месте контакта ноги с поверхностью можно рассматривать как анизотропное, поэтому пространство стабильного контакта уже описывается не конусом, а треугольником, плоскость которого перпендикулярна направлению движения колес.
Разработчики создали алгоритм удержания баланса, который учитывает конусы трения и рассчитывает для каждого шага или движения на колесной платформе такое движение, чтобы привести центр масс робота в стабильное состояние. Инженеры заложили в алгоритм управления три типа движений: ходьба на двух ногах, езда на скейтборде с отталкиванием одной ногой от пола и езда на роликовых коньках. Авторы проверили работоспособность алгоритмов на человекоподобном роботе JAXON, рост которого составляет 188 сантиметров. Более подробно о его устройстве можно узнать в одной из предыдущих работ инженеров.
Испытания показали, что робот может стабильно ходить со средней скоростью 0,6 метра в секунду и кататься на скейтборде или роликовых коньках со средней скоростью один метр в секунду. В будущем инженеры планируют дорабатывать алгоритм для того, чтобы постоянно адаптировать движения робота в соответствии с показаниями его датчиков, а также для езды на коньках по льду.
Во время Зимних Олимпийских игр в Корее на одной из корейских лыжных трасс прошли соревнования по слалому среди гуманоидных роботов. Во время спуска роботам необходимо было проехать 80-метровую трассу и обогнуть пять флагов. Выиграл соревнования 125-сантиметровый робот Taekwon V частной компании Mini Robot. Он успешно объехал все пять флагов и добрался до финиша за 18 секунд.
9 октября 2018 года
Григорий Копиев