Говорят, что лучше делать что-то одно, но хорошо, чем делать средне сразу несколько вещей одновременно. Это правда, конечно, если речь идёт о приложении интеллектуальных или креативных усилий. Но как насчет, например, передвижения?
Люди обычно не задумываются о том, что выделывают их нижние конечности во время ходьбы. И правильно, «синдром сороконожки» никто не отменял. И тем не менее в таком вот «автоматическом режиме» человек быстро идет по ровной поверхности, перепрыгивает через маленькие лужи и, балансируя, слегка скользит по залитому льдом зимнему тротуару.
Роботы с возможностью мультимодального движения по идее должны стать механическим организмом, способным на все те эволюционные достижения, которые демонстрирует психофизическое развитие человеческого организма. Однако на деле, то есть в реальности, такого рода роботы пока что представляют собой нагромождение систем, которые очень плохо работают друг с другом.

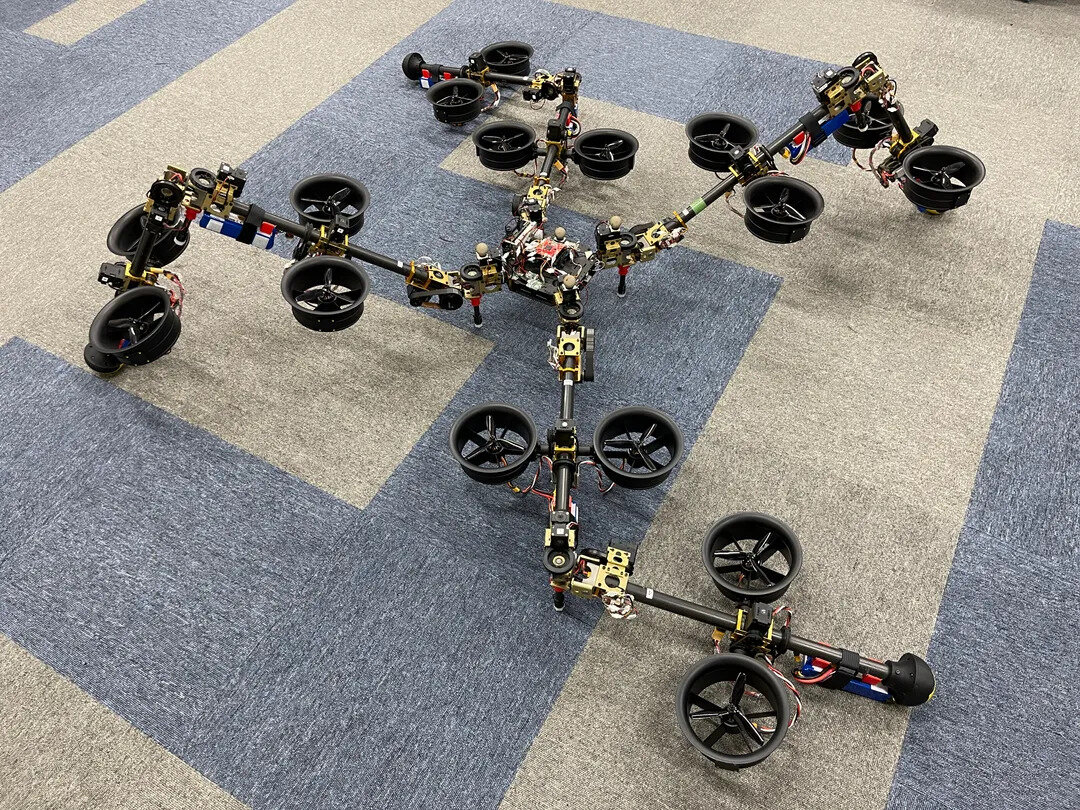
Новый робот, созданный в университете Токио, получил четыре многопрофильные конечности и довольно спорный акроним Spidar. Попытка создать узнаваемую аналогию очевидна и Spidar легко превращается в английское слово Spider или Паук. И хотя у настоящего паука должны быть все восемь лап, а у Spidar их всего четыре, сходство явно на лицо. Дословно, если хотите, «паук» именуется как «SPherIcally vectorable and Distributed rotors assisted Air-ground amphibious quadruped Robot». Но главное его достоинство не в этом. Робот поразительно удачно использует двигательную систему с изменяемым углом прикладываемого усилия в качестве многоцелевой. Иными словами, ему удаётся избежать дублирования систем движения за счет многочисленных пропеллеров, которые не только помогают ему идти, но и поднимают в воздух.
На сегодня Spidar — это прототип, одна из признанных удачной попыток создать многоцелевого легкого робота, способного как минимум поднять вес равный собственному. В режиме полета японский «паук» может продержаться 9 минут, по земле бродит аж целых 18 минут. Идея очень неплохая и реализация подстать. Представьте себе парочку таких роботов, колесящих на красной планете вместе с вездеходами и в нужное время взлетающих над поверхностью Марса, чтобы сделать панорамные снимки или выбрать безопасную дорогу. До реального применения Spidar еще далеко. Но создание «паука» представляется экспертам значительным достижением, двигающим человечество вперед в деле создания эффективных мультимодальных роботов