Малые архитектурные формы (Пермь)
Автор проекта: Егор Бобылев
Наставник: Надежда Фадеева, руководитель промдизайнквантума
Проект представляет собой варианты для благоустройства территории города Перми. Целью проекта являлось создание малых архитектурных форм для урбанистической среды: качественное и современное общественное пространство будет привлекать людей и поможет в развитии района.
Для достижения цели были выполнены следующие задачи:
1. Проведён поиск и аналитика общественных пространств
2. Созданы эскизы и произведён выбор подходящих вариантов. Установлена общая концепция общественного пространства места встречи
3. Сформирована композиция, которая будет сочетаться с рельефом, а также по формам между собой, задавая общую стилистику
4. Смоделированы трёхмерные объекты архитектурных форм
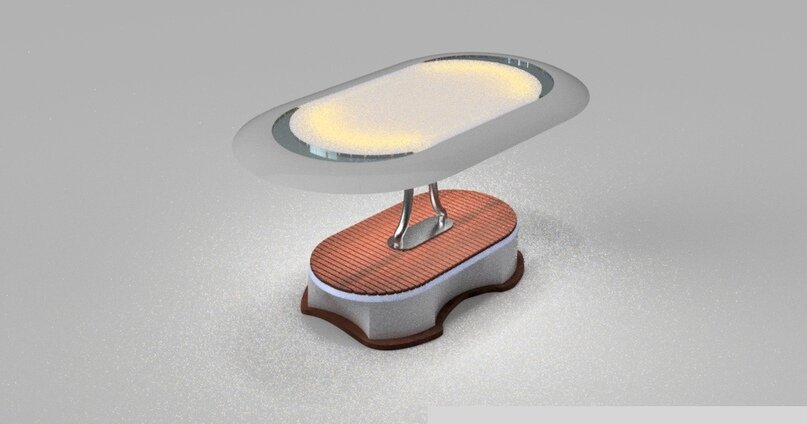
Первый объект — лавка с навесом. Она оснащена освещением и портами для зарядки мобильных устройств. Материалы: пластик, дерево, металл.
Особенности дизайна: скругленные формы, устойчивые к среде материалы, в колорите преобладание светлых тонов.

Также были созданы несколько сочетающихся между собой объектов: две скамьи, две урны и осветительный элемент воспринимаются как целостная композиция.

Скамья имеет волнообразную форму, повторяя рельеф, скругленные элементы конструкции более безопасны для эксплуатации. Объект выполнен из металла (каркас) и композитного материала (дерево+пластик). Урна для сбора мусора — имеет декоративные композитные элементы и металлическую конструкцию ёмкости. Для забора мусора может быть использован роликовый механизм с ограничителем.Фонарь оснащён светодиодной лампой для уличного освещения и портами для зарядки мобильных устройств.
Материалы: металл, композит, пластик.
В итоге удалось создать малые архитектурные формы, которые стилистически едины и подходят для городского общественного пространства, благодаря композитным износостойким материалам.
Манипулятор «Дельта» (Псков)
Участники: Денис Долгов
Наставник: Лубягин Игорь
Цель: разработать «дельта»-манипулятор и оптимизировать его работу.
Задачи:
- Познакомиться с кинематикой работы и функциональным устройством манипуляторов с разомкнутой и замкнутой кинематическими связями.
- Смоделировать недостающие элементы для «дельта»-манипулятора и распечатать на 3D-принтере.
- Собрать «дельта»-манипулятор с заданными характеристиками.
- Написать программу, учитывая расчёты, для увеличения скорости отклика (отзыва).
Роботом-манипулятором принято называть тип промышленных роботов с функциями, аналогично функциям человеческой руки. Участки манипулятора имеют соединения, допускающие поступательные или вращательные движения. Дельта-робот был изобретен в начале 1980- х годов Реймондом Клавелем в Швейцарии. Основным замыслом было оперировать лёгкими объектами, но с большой скоростью, то что требовалось промышленности в то время.
На рисунке приведен общий вид манипулятора «Дельта», который состоит: верхняя платформа, образованная точками A,B,C; три кинематические цепи: H, E, B; F, D, A; I, G, C; приводят в движение платформы; в точках H, E, F, D, I, G установлены поворотные шарниры; точки A, B, C закреплены к серводвигателям Dynamixel AX-12A.
Главным преимуществом дельта-роботов является скорость: тяжёлые двигатели размещены на неподвижном основании, движутся только рычаги и нижняя платформа, которые стараются изготавливать из лёгких композитных материалов, уменьшая тем самым их инерцию. Чтобы построить своего собственного дельта-робота, необходимо научиться решать две задачи.
В первой ситуации нам известна позиция, в которую мы хотим переместить манипулятор нашего робота (например, мы хотим схватить печенье, которое находится на конвейере в точке с координатами (x, y, z). Для этого нам требуется определить величины углов, на которые мы должны повернуть двигатели, связанные с рычагами робота, чтобы установить его в правильное положение для захвата. Процедура определения этих углов называется обратной (в некоторых русскоязычных источниках употребляется слово «инверсной») кинематической задачей.
Во второй ситуации нам известны углы, на которые повёрнуты управляющие моторы робота (если мы используем сервомоторы, то углы легко можно узнать, считав показания с датчиков углов поворота), и мы хотим найти положение платформы робота в пространстве (например, чтобы скорректировать его позицию) — это прямая кинематическая задача.
Основная проблема манипуляторов:
Конструкция обычного манипулятора с разомкнутой кинематической цепью представляет собой механизированный вариант человеческой руки с локтевым и лучезапястными суставами. Такие конструкции оказываются неуклюжими в ограниченных условиях и не подходит для большинства промышленных процессов на производственной линии. Альтернативой становится манипуляторы с замкнутой кинематической цепью, как еще их называют «Дельта»-манипуляторами. Такой тип манипуляторов популярен для использования труднодоступных местах в производственной линии. Минус «Дельта»-манипулятора – мобильность и ограничения по осям X, Y или Z, и они не вращаются.
Выводы:
В результате работы был спроектирован и создан «дельта»-манипулятор и оптимизировать его работу.
- До начала разработки нового манипулятора, познакомились с кинематикой работы и функциональным устройством манипуляторов с разомкнутой и замкнутой кинематическими связями.
- Смоделировали недостающие элементы для «дельта»-манипулятора и распечатать на 3D-принтере, а именно, две платформы, три плеча, оси.
- Собрали «дельта»-манипулятор с замкнутой кинематической цепью, с использованием 3-х степеней свободы.
- Написать программу, учитывая расчёты, для увеличения скорости отклика, с учетом тактового взаимодействия и параллельного выполнения задач.