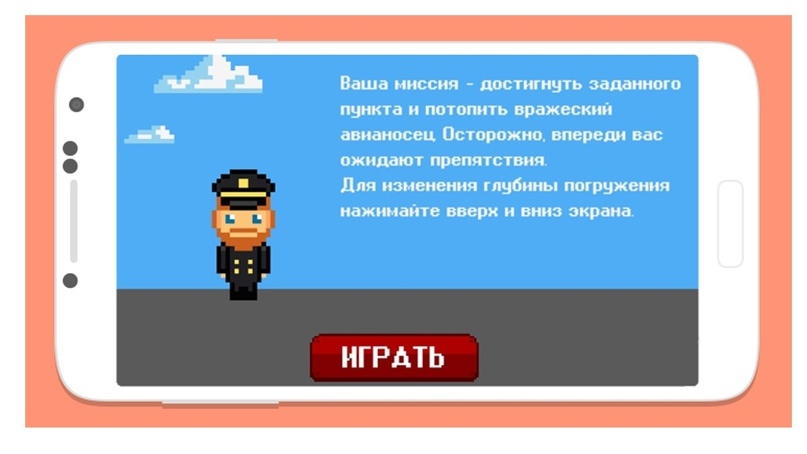
Игра «Подводная лодка» (Северодвинск)
29 июня в России отмечали День кораблестроителя. В преддверии праздника кванторианцы из VR/AR-квантума совместно с наставником Мариной Анатольевной Жирновой создали игру «Подводная лодка». С помощью инструмента uScript ребята сделали прототип работающей игры, который в дальнейшем использовался для программирования на C+. В разработке использовалась пиксельная графика, созданная с помощью сервиса piskelapp.com. Сборка на Android была выполнена в профессиональной платформе для создания игр Unity.
Игру можно установить на телефоне, скачав ее по ссылке или в Google Play
Управляя подводной лодкой, пользователям необходимо уклониться от атак врагов и пройти полосу препятствий – мины и айсберги. В финале атомоход ожидает встреча с авианосцем противника. Приложение создано в ретро стиле аркадных игр с 2D графикой.⠀ ⠀
Партнёры детского технопарка из Проектно-конструкторского бюро ОАО «ПО «Севмаш» принимали активное участие в разработке концепции игры и стали первыми пользователями.⠀
Гидропонная система будущего (Томск)
Межквантумный проект IT-квантума и биовантума (авторы проекта: Сергей Романов, Михаил Захаров и Кирилл Тучков). Команда разрабатывает установку, которая автоматизирует процесс выращивания растений.
Смотрите видео, в котором кванторианцы рассказывают о своей работе
Беспилотное такси (Владимир)
Кванторианец Саша Сергиенко начал заниматься проектом в 2019 году и уже к концу года представил его на региональном этапе Всероссийского конкурса школьных инженерных проектов «Поколение М».
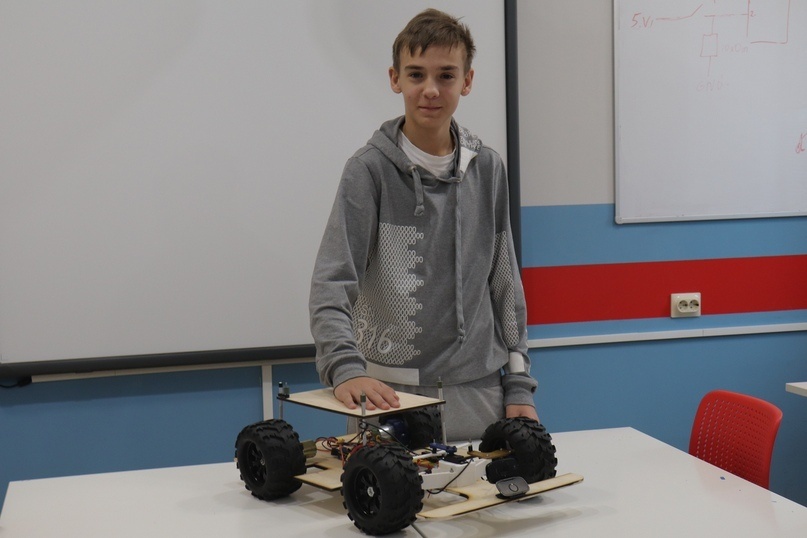
Кванторианец работает над созданием беспилотного такси под управлением искусственного интеллекта.
Конструктивные особенности: основу прототипа составляет рама из фанеры; поворотная кинематика аналогична автомобильной. Прототип оснащен контроллером Arduino, управляется с пульта, предусмотрена возможность транспортировки ноутбука для управления. Оснащен камерой для распознавания дорожных знаков. Отличие от аналогов в том, что в данном проекте предусматривается электрический двигатель.
Перспективы развития: управляющая программа будет написана на языке ROS, появится возможность управления с ПК и возможность связи нескольких ПК между собой для обмена данными.