Как я уже писал, когда приходится решать задачу об эффективном перемещении робота в пространстве, ученые часто обращаются к природе. Причем речь может идти не только о существах с опорно-двигательным аппаратом, но и о дождевых червях, например.
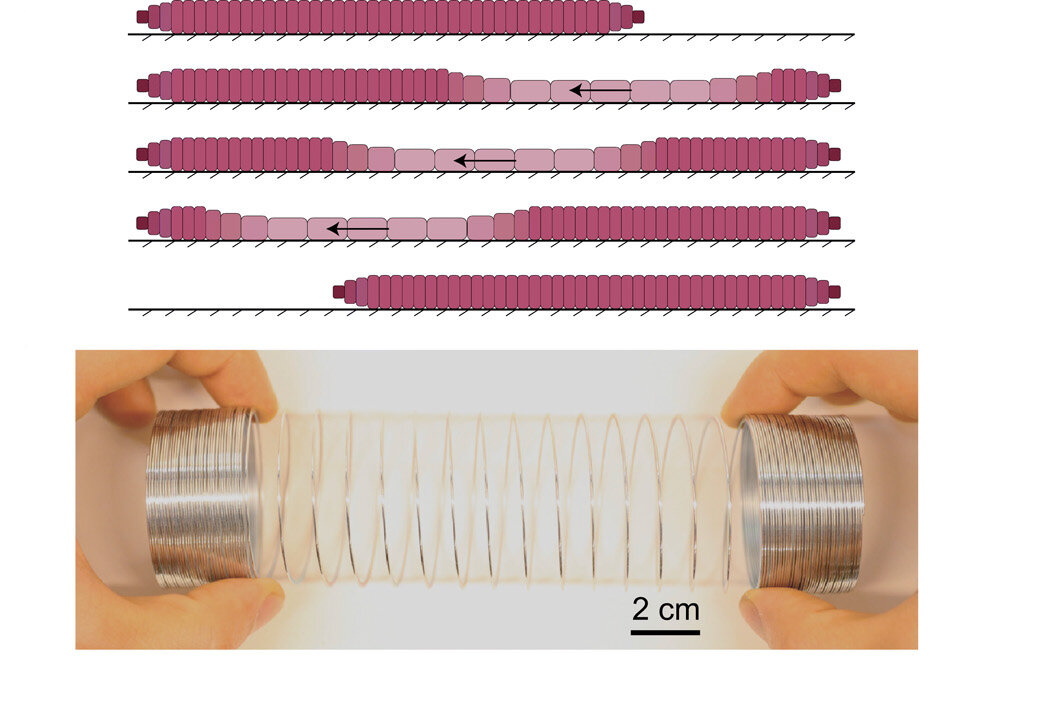
Дождевые черви передвигаются за счет мускульных сокращений, с помощью которых создается упругая волна. Растягиваясь, червь перемещает часть своего тела вперед по направлению движения, после чего сжимается, подтягивая оставшуюся часть тела. При этом сжатие придает червю импульс, перемещающий его в пространстве.
С практической точки зрения такой тип движения был бы выгоден роботам, предназначенным для работы в ограниченном пространстве или на сложных поверхностях, где системы с опорно-двигательным аппаратом не имеют достаточного для работы места или просто не могут стоять.
До последнего времени попытки построить роботов с таким типом движения сталкивались с существенным трудностями, в том числе из-за того, что недостаточно была проработана математическая модель такого движения. Без модели не было ясности, как должны работать условные «мышцы» робота, чтобы движение было эффективным.
В недавнем исследовании команда ученых из Гарвардского университета и университета Ле-Мана предложила такую модель и разработала простую демонстрационную машину с импульсным приводом. В качестве основы для робота была взята детская игрушка, металлическая «пружинка», а также пневматический привод и электромагнит. Пневматический привод смещает один конец пружинки, в то время как электромагнит удерживает противоположный конец и большую часть пружины. Как только привод заканчивает смещение, магнит выключается, пружина сжимается, а вся конструкция в целом двигается вперед.
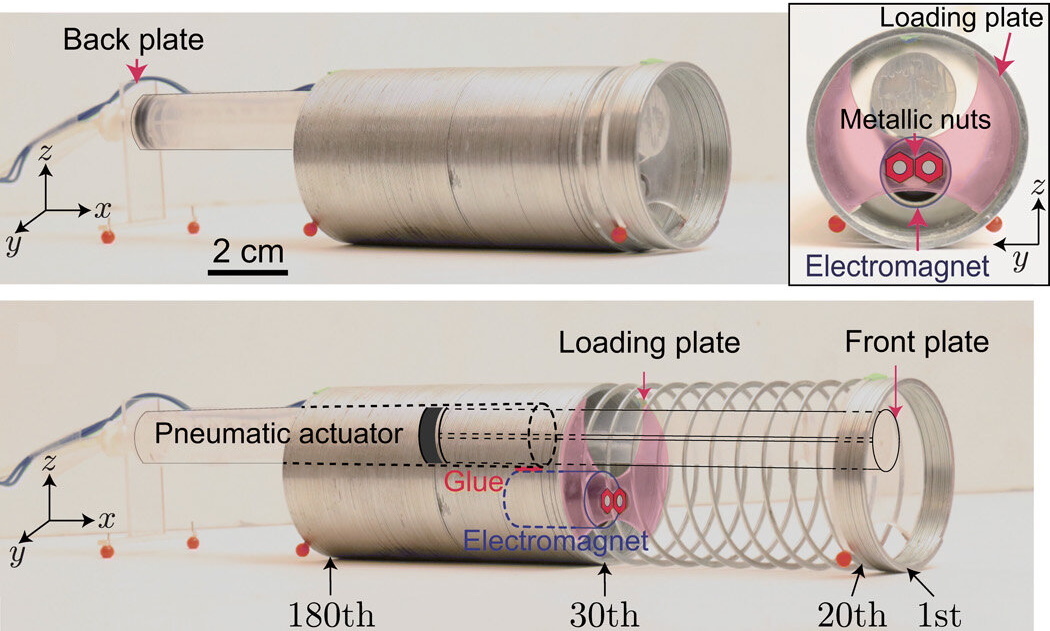
После демонстрации принципиальной возможности такого механизма движения исследователи начали подбирать оптимальные характеристики работы привода и электромагнита в зависимости от массы конструкции. Для этого каждый эксперимент фиксировался на высокоскоростную камеру. При неоптимальных параметрах, передаваемая с помощью упругой волны энергия частично рассеивалась из-за взаимного соударения колечек пружины, а также за счет частичного отражения упругой волны от головной части конструкции. В результате обобщения данных серии экспериментов удалось понять, что перемещение всей конструкции осуществляется за счет смещения ее центра тяжести при распространении обратной волны, и возможна ситуация, в которой распространяющаяся волна является солитоном, т.е. уединенной волной.
Оказалось, что именно в случае солитона достигается наибольший эффект. Это, вообще говоря, интуитивно понятный результат, т.к. основная особенность солитонов заключается в том, что они компактны и практически не теряют энергию при распространении. И поэтому такая волна передает энергию при «сокращении мышц» робота практически без потерь, заставляя систему двигаться с максимальной отдачей.
Пока такая система является не более чем забавной игрушкой. Но это пока. Легко представить область применения роботов, способных двигаться в ограниченных пространствах или по сложным поверхностям, а потому я предполагаю у этой работы большое будущее.
Немного видео с движением робота в разных режимах.
Мне важно Ваше мнение. Если нравится, ставьте лайк, подписывайтесь.