ИВА-система управления складом (Пермь)
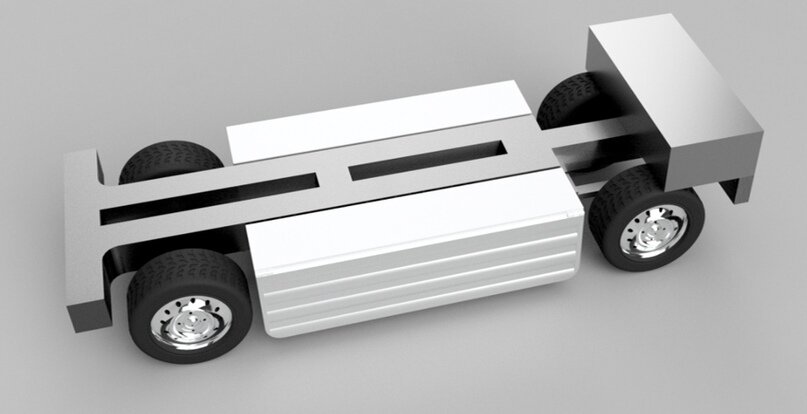
Цель проекта: Разработка автоматической роботизированной платформы, которая может перемещаться по складу, захватывать и перевозить различные виды грузов.
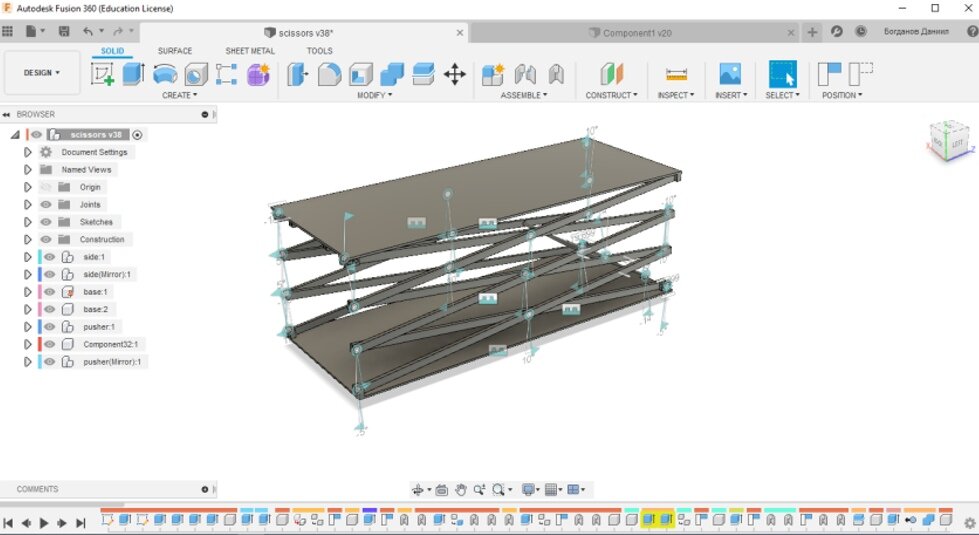
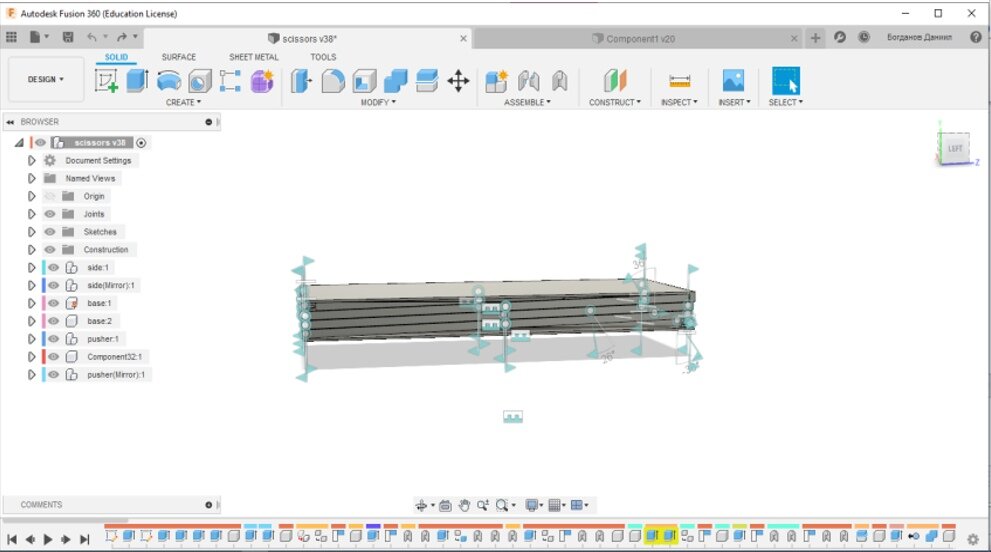
Команда поставила перед собой несколько ключевых задач: проанализировать рынок на наличие аналогов, выбрать наиболее подходящий вариант, определить функциональность каждого компонента, спроектировать 3D-модели каждого компонента, создать прототипы отдельных частей системы, провести симуляцию работы робота. В итоге получился робот из 4-ёх основных частей: рама, ножничный подъёмник, манипулятор и захват.
Полное описание проекта читайте здесь.
Разработка 3D модели института будущего в пространстве «Компас- 3D V 18» (Саров)
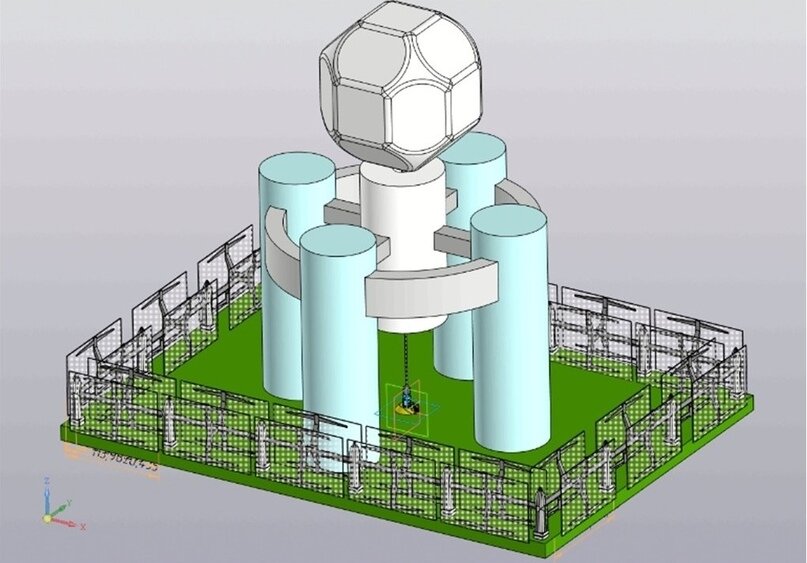
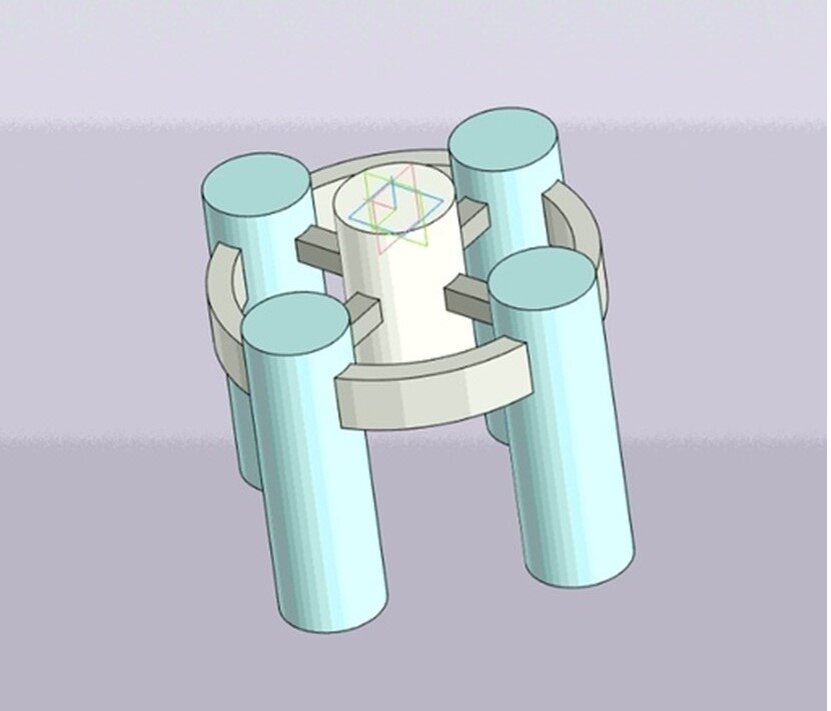
Цель проекта: создать 3D-модель Института будущего, посредством улучшения условий обучения и проживания в университете.
Глобальная цель, которая была поставлена перед кванторианцами — строительство Института будущего. Именно его 3D-модель представила команда на защите. Участники объединили вместе учебные и административные корпуса и жилой блок. Четыре цилиндрических здания по периметру — это учебные корпуса. В них будут расположены учебные аудитории, спорт залы, научные лаборатории, несколько конференц-залов.
Подробнее о проекте читайте здесь.
Дизайн-проект упаковки «Тольятти Молоко» (Тольятти)
Цели проекта: создать дизайн упаковки для серии продуктов «Еда с собой», разработать новый логотип и шрифт, предложить новые продукты.
Команда работала с проблемой отсутствия на рынке продукта, который может быть использован студентами и школьниками как быстрый и полезный прием пищи. После предварительных исследований, которые включали анализ рынка, потребителя (в том числе интервью), кванторианцы предложили своё видение дизайна упаковки и предложили новые форматы продукта.
Дизайн-проект интерьера (Северодвинск)
Елизавета Ковригина из детского технопарка «Северный Кванториум» представила свой проект на межрегиональном конкурсе «Библиосреда 2020». Он направлен на разработку дизайнерских решений интерьера современного школьного информационно-библиотечного центра.
Специально для конкурса Елизавета освоила программу для информационного моделирования зданий Revit от компании Autodesk.
Исследование культивирования хлореллы и её применение (Великий Новгород)
Проект учениц биоквантума новгородского детского технопарка Анастасии Крайневой и Ульяны Селивёрстовой «Исследование культивирования хлореллы и её применение» занял 13 место в рейтинге Всероссийского конкурса проектов «Реактор» в категории «Исследуй».
Цель: выбор оптимального режима культивации биомассы с использованием сточных вод рыбоводческих заводов Демянского района.
Хлорелла — род микроскопических одноклеточных зеленых водорослей из класса протококковых, широко распространённых в природе, которые имеют широкое применение в животноводстве. Хлорелла относится к зелёным кормам и среди растений имеет преимущество по очень многим показателям. Например, по химическому составу c ней не могут сравниться не только водные, но и наземные растения. Кроме того, она обладает белком высокого качества, который превосходит все известные растительные кормовые белки, т.к. в нем содержатся все необходимые аминокислоты, в том числе незаменимые.
«По окончанию выращивания хлореллы,мы убедились,что данный живой организм можно выращивать в условиях квантума и применять как пищевой ресурс для рыб в местных аквариумах. При получении достаточного количества клеточной массы планируется получение высушенного корма в форме хлопьев с последующим включением в пищевой рацион аквариумных рыб для дальнейших экспериментов по подтверждению питательности. Также данное исследование нам кажется перспективным, и мы можем рекомендовать данное решение как в аквариумистике, так и в сельскохозяйственном секторе нашего региона»