Добрый день! В своей предыдущей статье я обещал сравнить лучшие и не очень, по моему мнению, стороны двух проектов которые повлияли на мое решение создавать человекоподобного робота. Ну что - давайте буду рассказывать.
Человекоподобный робот
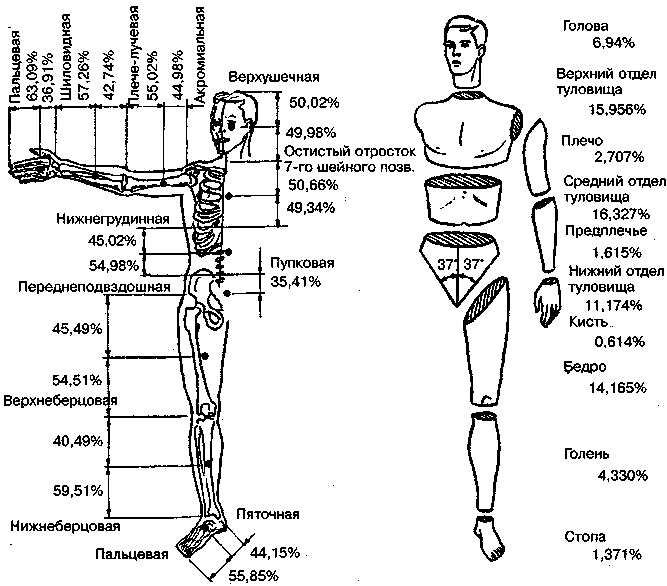
Давайте сначала разберемся что такое человеческое тело, его части и на какие параметры нужно обращать внимание.
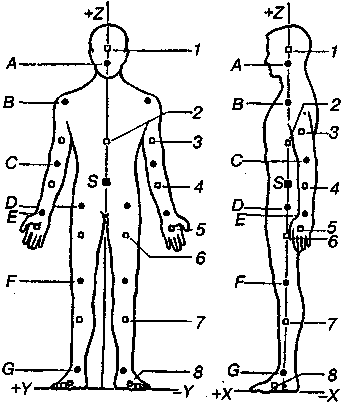
Мы живем в 3-х мерном мире, вообще вроде как считается, что четвертое измерение - время, но сейчас нам данный факт не интересен. Значит и само тело робота имеет размер, и все его составные части тоже. Которые под определенными углами соединены в состоянии покоя и имеют ограниченные степени свободы в отношении друг друга. Степеней свободы может быть не более 6. Т.е. если взять 3-х мерную систему координат - из школьного курса помнятся оси обозначенные X, Y и Z, то получиться что степени свободы - это перемещения вдоль осей и вращения вокруг них. Таким образом обязательно необходимо разделить робота на части, которые будут иметь размеры и степени свободы максимально приближенные к человеку в трех измерениях и 6 степенях относительно друг друга.
Следующий параметр который является тоже одним из основных является масса и связанные с нею центр тяжести и вес. Тут вроде как все должно быть понятно - каждая часть робота должна иметь какую-то массу, и по моему мнению она должна быть пропорциональна подобной человеческой части.
В качество литературы для более глубокого погружения в тему рекомендую две - которые повлияли на мое понимание вышесказанного в отношении человеческого тела:
- Биомеханика. Дубровский В.И., Федорова В.Н.
- Анатомия для скульпторов. Улид Заринс и Сандис Кондратс.
inMoov
Очень правильная и сильная идея, которая заложена в этот проект, что строительство робота доступно всем желающим и интересующимся. То что используются повсеместно доступные и недорогие компоненты сервоприводы, принтер, usb-камеры, Ардуино и Кинект. Свободный робот использует свободное программное обеспечение. Он полностью смоделирован в Blender, используются открытые и доступные языки: Python, JavaScript. Робот как социальный проект. По задумке он наверное и не должен был ходить. Общение с людьми - вот его цель. Использование так называемого "несущего корпуса" с одной стороны скрывает хаос проводов, с другой позволяет меньше думать о компоновке. Использование параллельных манипуляторов и линейных актюаторов.
Минусы, по моему мнению. Он огромный. Желание сделать пусть и демонстрационного робота полноразмерным, накладывает огромные ограничения на биомеханику. Нужны мощные сервоприводы, нужно более надежно печатать, что утяжеляет части и нужны ещё более мощные сервоприводы. Он не двигается даже отдаленно напоминая человека. Т.е. никто не думал об изначальных углах и поворотах частей. За счёт несколько хаотичного наполнения сервоприводами получилось такое же управление - сложно заливать логику работы в контроллер, нет какого-то соответствия и программного интерфейса.
Poppy
Желание полностью соответствовать кинематике человеческого тела изначально. Единый программный интерфейс управления. Небольшие размер и соответственно масса. Для такого робота достаточно не сильно мощных серовоприводов. Проектировщики думают его научить ходить.
Минусы. Он очень дорогой для самостоятельной сборки. Недостаточно продуманная, как по мне, компоновка. Я думаю нужно было в средней части робота где центр тяжести (средний отдел туловища), а также в голени и ключица + лопатка (присоединение стопы и плеча) использовать параллельные манипуляторы с линейными актюаторами.
Свой вариант
Наконец я озвучу свою идею что и как я буду делать.
- Определенно робота в полный размер делать дорого и бессмысленно. Таким образом наверное определю для себя размер в 1 метр. Он будет выше французского Poppy, но ниже inMoov. Если посмотреть видео с Poppy понятно что мощности сервоприводов, которые данная команда рекомендует - для нашей цели должно хватить.
- Массу робота я пока определил в 5 кг. Разумеется все части должны быть в правильных человеческих пропорциях. Глядя на Poppy - видно что есть большое недовес - а значит есть где разместить аккумуляторы.
- Использование недорогих сервоприводов, как это делал создатель inMoov. Я уже сделал таблицу сравнительную сервоприводов которые являются основой для Poppy с китайскими аналогами - позже я её опубликую. Разница в стоимости в несколько раз, хотя мы при этом и теряем обратную связь и простоту управления.
- Использование параллельных манипуляторов и линейных актюаторов в частях, что я выше же написал. Тут придется немного заморочиться, так как готовых изделий я не нашел, таким образом 3D-печать, дешевые комплектующие и смекалка - наше все.
Таким образом робот должен быть недорогим, подвижным и биомеханикой быть как человек. В следующем очерке хочу поговорить о математике, как необходимо представлять, как мы будем это все двигать и делать расчеты.