Последняя часть шестой и седьмая лекции курса "Преобразователи информации" были посвящены архитектурам аналого-цифровых преобразователей перемещения и угла поворота.
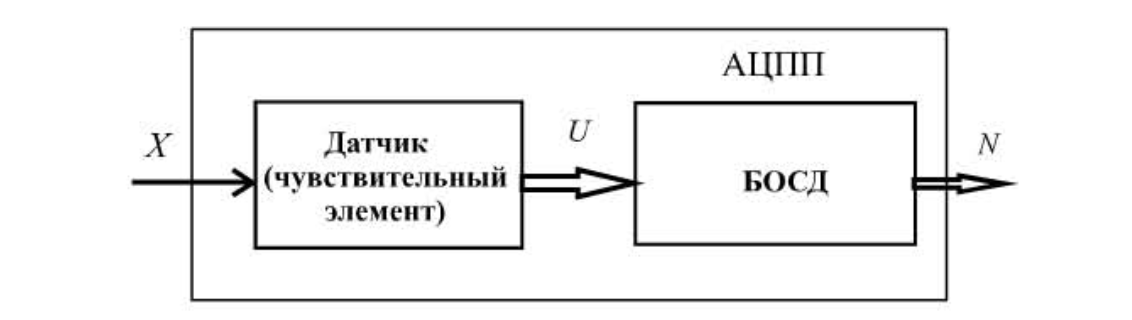
Аналого цифровые преобразователи перемещений (АЦПП) и угла поворота (АЦПУ) – это класс устройств ставящие в соответствие линейному перемещению или угловому повороту цифровой код. Другими словами преобразуют перемещение в код. В общем случае такой преобразователь состоит из любого чувствительного элемента (индуктивный, магнитный, световой и тому подобное), преобразующего перемещение в аналоговый электрический сигнал, и блока преобразования сигналов датчика, преобразующего аналоговый сигнал в цифровой код.
Рассмотрим некоторые из основных архитектур, которые условно можно разделить на две категории: позиционные и накапливающие. Первые измеряют абсолютное положение, вторые – относительно некоторого репера (в смысле референтной метки, а не 50 cent).
Кодовые АЦПП
Кодовые АЦПП используют пространственное кодирование для определения своей текущей позиции. Основными элементами этого преобразователя являются кодовая шкала, на которую нанесены метки, и линия считывающих элементов, различающих эти метки. Это могут быть прозрачные/непрозрачные области для фотоэлементов или магнитные метки и так далее. Считанный с чувствительных элементов код и является позицией в пространстве.
Основным минусом такой архитектуры являются вероятные ошибки кодовых переходов. На сигналах датчиков всегда присутствует переходной процесс при переходе между кодами, из-за чего какой-то датчик из линии считывания кода может сработает чуть раньше остальных, какой-то – чуть позже, на выходе ЛСК кратковременно появится ошибочный код.
АЦПП с двоично-сдвинутыми кодами
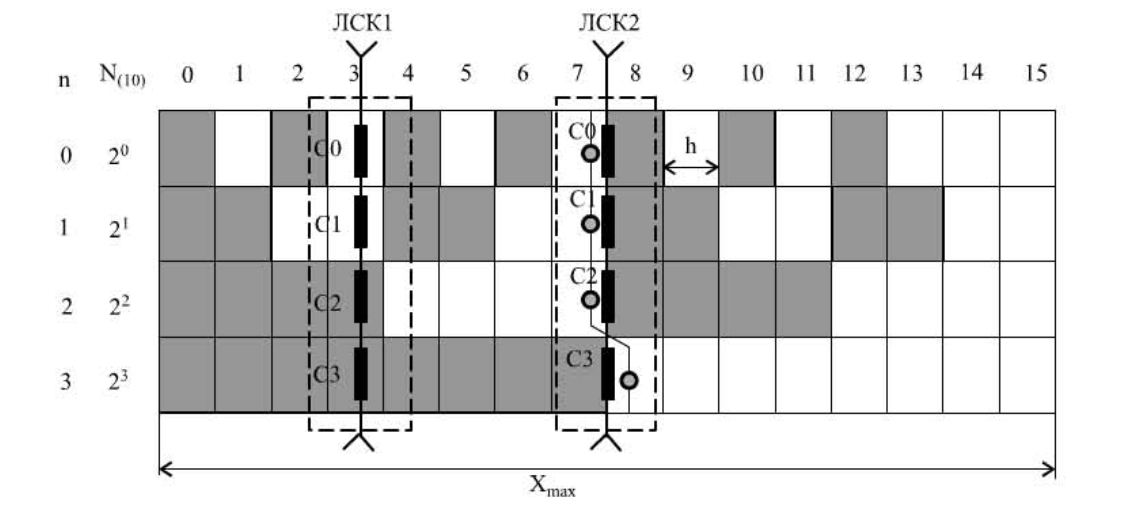
Проблема с ошибками кодовых переходов решается использованием двоично-сдвинутых кодов: код Баркера или двоичная щетка. Количество считывающих элементов увеличивается и располагается одним из двух способов изображенных ниже.
В V-коде нулевой разряд имеет один считывающий элемент, а все остальные по два, при том расстояние между с каждым разрядом увеличивается вдвое. Итоговый код рассчитывается по следующей формуле.
Благодаря такому расположению, все датчики, кроме младшего разряда, при считывании никогда не будут находиться на границе областей. Однако, из-за того что для вычисления последнего разряда используется значения всех предыдущих, у такой схемы относительно высокая комбинационная задержка, ограничивающая высокую скорость работы преобразователя.
Альтернативой является U-код, в котором в зависимости от текущего значения младшего разряда считывается левая или правая щетка, сдвинутая на пол разряда, что гарантирует отсутствие шума кодовых переходов. Однако, из-за близкого расположения датчиков (ширина единицы младшего разряда) технологичность таких АЦПП значительно ниже, чем у V-кодов.
АЦПП с однопереходными кодами
Еще один из способов избавления от шума кодовых переходов – это использование в кодовой шкале кода Грея, то есть такого кода, в котором при переходе к следующему значению всегда меняется только один разряд числа. Пример ниже.
Быстродействие таких АЦПП также ограничено комбинационной задержкой схемы преобразования кода Грея в двоичный код.
Накапливающие АЦПП
Особенность накапливающих АЦПП в том, что они измеряют относительное перемещение, то есть они измеряют на сколько переместились, а не где сейчас находятся.
Перемещение квантованной шкалы относительно двух считывающих элементов, квадратурно расположенных друг относительно друга (то есть на расстоянии четверть периода) вызывают на выходе датчика поток битов, которые для измерения перемещения должны суммироваться алгебраически, то есть с учетом направления. Если шкала двигается вправо, то каждый раз переходя из 0 в 1 датчиком A триггер T будет фиксировать значение B, которое, в этом случае всегда будет равно 1 (так как стоит левее) и счетчик будет суммировать. Если шкала будет двигаться влево, то про переходе 0 ➝ 1 датчиком A, датчик B будет в нуле, а значит счетчик будет считать вниз.
Плюс подобных АЦПП в их относительной компактности и простоте. Минус – близко расположенные датчики и накапливающаяся ошибка.
Одним из эффективных способов построения таких АЦПП является использование естественных кодовых шкал, например, на основе длинны волны света, как это делается в лазерных интерферометрах.
Лазер (1) испускает луч (2) со стабильной длинной волны, который попадает на полупрозрачное зеркало (3) в точку M и разделяется на два луча (4 и 5). Один из лучей (4) попадает на закрепленный уголковый отражатель (6) и возвращается на полупрозрачное зеркало в точку N, туда же приходит сигнал (5) отраженный от уголовного отражателя на подвижном элементе (7). В точке N лучи интерферируют. Разделенные же лучи подаются на квадратурно сдвинутые датчики света с которыми работают, как с традиционными накапливающими АЦПП.
Плюсами таких интерферометров являются: высокие чувствительность, быстродействие и точность. Минусы – как правило это сложные, громоздкие устройства.
Рекурсивные кодовые шкалы
В ряде случаев, например, в малогабаритных АЦПУ, количество кодовых дорожек необходимо уменьшить. В этом случае можно применить рекурсивные кодовые шкалы (РКШ). При построении РКШ используются псевдослучайные кодовые последовательности, которые генерируются сдвиговыми регистрами на D-триггерах, охваченных линейной обратной связью. 𝛂n – значение, хранящееся в n-ом D-триггере.
Сгенерированная последовательность наносится на шкалу. В зависимости от длинны последовательности устанавливается требуемое количество считывающих элементов на расстоянии младшего разряда друг от друга. Считанное значение однозначно соответствует абсолютной позиции преобразователя.
Минус такого подхода – низкая технологичность из-за близкого расположения датчиков и задержка образуемая схемой приведения кода к двоичному абсолютному значению.
Потенциометрические АЦПП
Одна из наиболее простых архитектур АЦПП основанная на потенциометре изменяющим сопротивление на выходе, в зависимости от своего положения. Потенциометр подключается к опорному напряжения и ко входу АЦП, который преобразует напряжение в код.
Плюсы – простота и технологичность. Минус – механическое сопряжение элементов и зависимость сопротивления от температуры.
АЦПП на дифференциальных трансформаторах (LVDT)
Наибольшее распространение для точных измерений линейных и угловых перемещений в тяжелых эксплуатационных условиях получили работающие на переменном токе линейные дифференциальные трансформаторы с переменным коэффициентом передачи, получившим повсеместное обозначение LVDT (Linear Variable Differential Transformers).
В простейшем случае такой преобразователь содержит одну первичную и две вторичных обмотки. Линейное перемещение ферромагнитного сердечника внутри обмоток трансформатора создает электромагнитный дисбаланс, вызывающий изменение индуктивности обмоток и, следовательно, изменения сигнала в выходных обмотках трансформатора.
При дифференциальном включении вторичных обмоток выходной сигнал будет пропорционален перемещению сердечника.
Плюсы – абсолютные измерения, высокая точность и линейность, высокая надежность в жестких условиях эксплуатации, широкий диапазон измерений, малое трение и малый выходной импеданс. Минусы – значительная избыточность длинны (реально используется только до 1/3 всей длинны преобразователя), гистерезис (то есть при изменении направления движения преобразователь не сразу отреагирует на это).
Ёмкостные щупы
Ёмкостные датчики являются одними из самых распространенных в силу своей технологичности и высокой чувствительности. Так как для плоских конденсаторов емкость определяется как произведение диэлектрической проницаемости среды 𝛆 на отношение площади перекрытия пластин S к расстоянию между ними C = 𝛆 * S/d, то изменяя эту площадь или расстояние, и измеряя полученную ёмкость, можно сделать предположение о угле поворота или дальностью. Поясняющая картинка ниже.
Плюсы таких преобразователей – технологичность, широкий температурный диапазон, высокая чувствительность. Минусы – чувствительность к высокочастотным наводкам, сложные измерительные схемы и высокое внутреннее сопротивление.
Дальномеры
Дальномеры – это класс устройств осуществляющий измерение дальности неконтактным способом, за счет излучения сигнала, принятия отраженного сигнала и на основе этого делающего предположение о дистанции до объекта отражения. Существуют три основных метода используемых для этого: импульсный, фазовый и частотный.
Импульсные дальномеры
Идея работы импульсных дальномеров заключается в измерении времени за которое излученный сигнал пройдет от дальномера до объекта отражения, и обратно. Зная скорость распространения сигнала в среде и время прохождения сигнала, можно сделать предположение о дальности до объекта отражения. В качестве сигнала может выступать что угодно: звук, электромагнитная волна, свет и т.д.
Плюсы – относительная простота. Минусы – точность измерения зависит от скорости работы аппаратуры и особенностей среды распространения сигнала.
Фазовые дальномеры
Подход позволяющий производить наиболее точные измерения, но только на коротком диапазоне, ограниченным периодом длинны волны излучаемого сигнала. Принцип работы таков – излучается сигнал с фиксированной частотой, сигнал отражается от поверхности и попадает на приемник. Внутри дальномера сравнивается смещение фазы излученного и принятого сигнала, на основе чего и делается предположение о дальности до объекта отражения.
При таких измерениях нельзя сказать сколько полных периодов укладывается в измеряемый диапазон, можно сказать только о смещении фазы. По этой причине часто в промышленных измерениях объединяют импульсный метод (для грубого измерения) и фазовый (для точного).
Частотные дальномеры
Еще один подход для бесконтактного измерения дистанции – частотный метод. Идея заключается в следующем, непрерывно излучается частотно модулированный по линейному закону сигнал, то есть частота излучаемого сигнала линейно повышается, а потом понижается. Излученный сигнал отражается от некоторого объекта на пути и какое-то время спустя попадает на приемник дальномера. В смесителе излучаемый и задержанный по времени отраженный сигнал смешиваются, полученный результат усиливается. Спектр полученного сигнала содержит информацию о дальности до объектов отражения в виде появления гармонического сигнала на частоте, прямо пропорциональной дальности.
К преимуществам такого подхода относятся: непрерывность измерения, высокая точность, возможность определять расстояния одновременно до нескольких объектов отражения. Если объект отражения и дальномер будут двигаться относительно друг друга, то на частотной картине проявится эффект Доплела, в виде расщепления пика сигнала на спектре. Среднее между полученными частотами есть расстояние до объекта отражения. Расстояние между расщепленными пиками содержит информацию о скорости относительного перемещения. Частотные дальномеры способны производить одновременное измерение и дальности, и скорости.
Основным недостатком таких дальномеров является относительная сложность.
ДОМАШНЕЕ ЗАДАНИЕ
Для выбранного ранее АЦП нарисовать в любом подходящем редакторе или САПРе схему подключения АЦП к ПЛИС. Всю обвязку также необходимо нарисовать (подключение питания, может каких-то конфигурационных пинов или делителей, или еще чего). Полагать что любое требуемое питание может быть подано снаружи. Входной сигнал идет по одиночному проводнику, сигнал не дифференциальный. Также необходимо полагать, что характеристики входного сигнала уже удовлетворяют параметрам АЦП, то есть ФНЧ не нужен. ПЛИС полностью рисовать не обязательно, достаточно обозначить пины, к которым будет подключаться АЦП.
Схему распечатать в pdf и прислать мне на почту вместе с datasheet'ом на АЦП.
Основные источники информации
- Материалы использованные на лекции практически полностью опираются на данный источник, за исключением небольших нюансов и дополнений по дальномерам, однако, материалов этой книги вполне достаточно для общего понимания концепции [В.Б. Топильский. Схемотехника аналого-цифровых преобразователей - главы 5-8]
Дополнительные источники информации
- Хорошая статья на хабре про то, как работает и как собрать фазовый дальномер