С наступлением Четвертой промышленной революции кардинально изменилась наша жизнь и наше восприятие мира. Границы между механическими, электронными, цифровыми и биологическими аспектами нашей жизни размылись и это положило начало новой эре, которую могли себе представить только писатели научной фантастики. Это также привело к появлению различных технологий, которые сделали нашу жизнь легче, интереснее, но иногда немного «нечеловеческой». Вот некоторые из таких футуристических технологий, о существовании которых вы, наверное, и не подозревали.
1. Атомная батарея
Это устройство, которое использует энергию радиоактивного распада для производства электричества. Она необходима в оборудовании, которое используется длительное время без контроля со стороны человека, например, в космических аппаратах, автоматизированных научных станциях в отдаленных местах, кардиостимуляторах и подводных системах.
Впервые такая ядерная батарея или радиоизотопный генератор была представлена Генри Мозли в 1913 году. В последующие 20 лет проводились значительные исследования с целью создания батарей с длительным сроком службы для космических полетов. На сегодняшний день уже найдено несколько способов получения электроэнергии из ядерных источников, а современные нанотехнологии позволили создать новые приборы и улучшить свойства материалов, которые ранее были недоступны.
Так же как и ядерный реактор, атомные батареи вырабатывают электроэнергию из атомной энергии, но при этой не происходит цепная реакция. Энергия преобразуется двумя способами: термическим ( как в термоэлектрическом или термоионическом генераторе) и нетермическим, при котором извлекают часть падающей энергии по мере того, как она разлагается и превращается в тепло.
2. Мощный Экзоскелет
Это износостойкая мобильная машина, которая облегчает движение конечностей с большей прочностью и выносливостью и приводится в действие системой гидравлики, моторов, пневматики и рычагов.
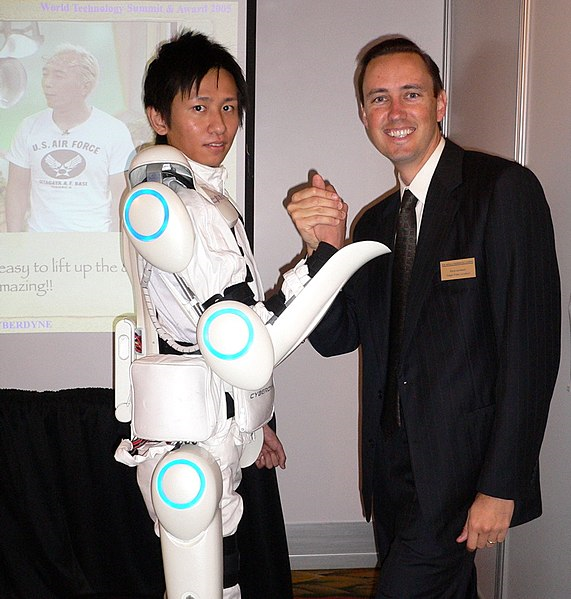
Первым прототипом экзоскелета был костюм с электроприводом, разработанный Николасом Ягнём в 1890 году. Первая мобильная интегрированная машина с движением человека под названием "Хардиман" была разработана совместно компанией General Electric и Вооруженными силами США в 1960-х годах. С его помощью можно было поднять 110 кг веса, причем по ощущениям казалось, что поднимаешь 4,5 кг.
В 1986 году рейнджер армии США, известный как Монти Рид, сломавший спину в результате аварии на парашюте, разработал прототип экзоскелета под названием "LIFESUIT" (ЖИЗНЬ), текущий прототип которого может пройти 1.6 километра и поднять 92 килограмма.
3. Прозрачный датчик изображения
Это устройство представляет собой гибкий, прозрачный, бесконтурный датчик изображения, изготовленный из пластиковой пленки, покрытой флуоресцентными частицами, который может использоваться в устройствах пользовательского интерфейса, способных реагировать как на прикосновение, так и на жест.
Прозрачный датчик изображения был разработан исследователями Александром Коппельхубером и Оливером Бимбером из Университета Иоганнеса Кеплера, Линц, Австрия, которые использовали явление, заключающееся в том, что чем глубже свет проходит через полимер, тем сильнее он тускнеет. Поскольку в отличие от существующих технологий, полимеры нельзя разделить на отдельные пиксели, они измеряли относительную яркость света, достигающую сенсорной решетки по краям пленки, чтобы определить, куда входил свет.
Масштабируя процесс и используя технологию, аналогичную КТ, но с лазерами вместо рентгеновских лучей, Koppelhuber и Bimber смогли сделать прототип с низким разрешением. Используя передовые методы отбора проб, они также могут повысить разрешение. Новая бесконтактная технология в будущем может быть использована на телевидении и в компьютерах и даст геймерам полный контроль над жестами без необходимости использования камер или устройств слежения за движениями.
4. Гравитационная лампа
Это лампа, которая питается от мешка с песком или камнями, подвешенная за шнур, который постепенно опускается так же, как вес привода в часах с кукушкой.

Концепция GravityLight была разработана Клэем Мултоном и Майком Вофси в 2006 году, хотя ранние прототипы были признаны неэффективными. Они обнаружили, что 10 килограммов массы, поднятой на высоту одного метра, дают максимальную энергию 98 джоулей, что при 100% эффективности преобразования в течение пяти минут, дает 0,32 ватта и 0,16 ватта при 50%. Полученного светодиода было недостаточно для чтения или работы, поэтому они обменяли яркость подсветки на время подсветки.
После двух кампаний по сбору средств Мартин Риддифорд и Джим Ривз продолжили развивать свой проект. Медленно падающий вес вращает шестерни, приводящие в движение электрогенератор и питающие светодиод в течение 25 минут. После этого вес снова можно поднять с помощью шнуров, чтобы включить свет в течение следующих 25 минут. При массовом производстве эти лампы могут служить альтернативой обычным электрическим лампам или керосиновым лампам в бедных странах с нулевыми эксплуатационными расходами.
5. Робо-конечность, контролируемая мозгом
Это искусственная конечность, которую можно контролировать не более чем нормальным, подсознательным усилием или нейронной активностью, и которая в настоящее время используется для помощи паралитикам и тем, у кого нет конечностей.
Исследователи из Лаборатории прикладной физики Джона Хопкинса разработали усовершенствованный, управляемый разумом роботизированную конечность в рамках программы Revolutionizing Prosthetics (Революционные протезы). Рука была отдана Джонни Мэтини из Флориды, который потерял руку из-за рака в 2005 году.
Еще один роботизированный манипулятор был разработан Шуичи Нишио и Кристиан Криноза из Международного института передовых телекоммуникаций. Этим манипулятором можно управлять мысленно. При мысли о различных движениях, например, таких как поднятие стакана, в мозге формируется определенная картина электрической активности, которую считывают неинвазивные электроды, установленные на волосистой части головы. Шуичи Нишио и Кристиан Криноза разработали алгоритм, который может различать шаблоны, связанные с движением рук. После прочтения этого конкретного шаблона алгоритм передает сигнал на роботизированную руку двигаться соответствующим образом.
Читайте продолжение...