Это такой интересный вопрос, думаю как бы попроще на него ответить.
С детства не пытался решить задачи подбором формул, точнее всегда старался понять идею и после этого формулы сами собирались в нужную цепочку.
Теперь вернемся к нашему вопросу. Если Вы хотите поиграться в лего или ардуино. Покатать колесную базу в ручную или по датчикам, то зачем себя заморачивать лишними формулами. Как правило небольшие программы с подключениями модулей, давно написаны программистами (к сожалению не все корректно работают, но и на этом благодарность). Вы просто подключаете все что нужно - собрали схему и она работает. Великолепно, а зачем Математика спросите Вы.
Действительно зачем, если в жизни этим занимаются другие люди, которые на это учились и они как мы думаем все сделают за нас. К сожалению это далеко не так.
В любой системе есть понятия: устойчивые и не устойчивые процессы, регулирование, возмущающие воздействия. Многие смеются при виде роботов из Boston Dynamics - которых пинают, а они сохраняют устойчивость. Это все прикольно, но это колоссальный труд больших групп людей.
А теперь скажу так, создать робота, который катается на колесиках, может и школьник, а робота который ходит и еще может носить различные грузы без высшей математики(на которой выстроена ТАУ) в принципе не создать.
Если взять простой ПИД регулятор (да да это очень простой регулятор), то для его настройки без опыта понадобится не мало времени.
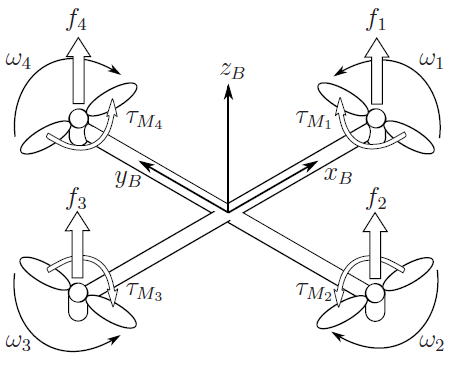
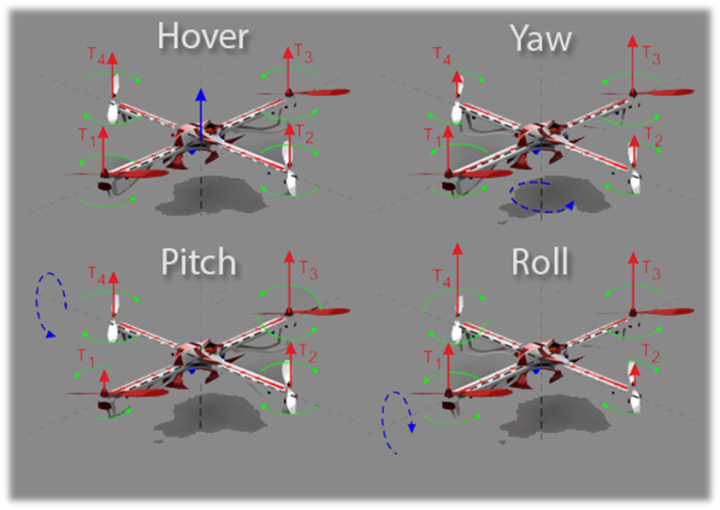
А теперь возьмем простой квадрокоптер (ха -ха скажут разработчики ПО для его полетов, конечно простой). Всего 4 вентилятора, которые казалось бы вращаются одновременно, включил их и управляй стрелочками вправо влево, но это лишь так кажется. В его основе стоит как правило 6-осный гироскоп. 3 оси измеряют свое положение в пространстве, а еще 3 измеряют динамическое равновесие. То есть подул ветер, и квадрокоптер просто сносит, тот гироскоп, который смотрит на положение в пространстве этого даже не поймет. Зато другие оси покажут, что было смещение и компенсируют это новыми скоростями на 4 вентилятора.
Так вот роботы, которые умеют держать равновесие - это еще сложнее система, Если в квадрокоптере, у вас только 4 вентилятора и основной способ управления ими - это задание скорости вращения.
То управления движением робота процесс куда сложнее и интереснее. Обратите внимание сколько времени человек тратит на обучение ходьбе (пол года не меньше), чтобы держать равновесие. После того, как он научился держать равновесие, он может бегать, прыгать или носить даже груз.Но этому всему мозг обучается, просто мы это забыли.
А теперь представьте на скольких точках опоры стоит человек. 2 основных, на которых держится вес и по несколько вспомогательных на стопах, с помощью которых идет балансирование. Рука поднялась изменятся центр статического равновесия и в это же время необходимо держать динамическое равновесие. Это все делается автоматом у человека с помощью положения стоп, о котором мы даже не задумываемся. Составить формулу простого шага человека еще сложнее, так как это процесс управляемого падения в течении нескольких сотых секунд, потом построение опоры и снова перенос масса и так далее.
У роботов нет такого инструмента как стопа у человека, там есть другие способы, но они должны четко соблюдаться. А это уже сложнейшая математика. Еще сложнее, когда робот берет груз и несет его. Даже просто поднять груз - уже задача не из легких(с точки зрения балансировки).
Поэтому вопрос о том нужна ли математика при построении роботов зависит от Вас. Каких роботов или элементы механики Вы хотите создавать, такая математика и будет.
Если Вам понравилась публикация, подписывайтесь на канал, за Ваши лайки чаще показывают Наши публикации.
Для поиска публикаций через поисковые системы, просто вводите слово Вивитроника.
Если есть вопросы или по желания, то пишите, черезОбратную связь