Давненько хотел собрать робота. Самого простого, который только и умеет, что ходить по нарисованной чёрной линии. Но руки всё никак не доходили.
Идея робота не нова, первый такой робот появился аж в 1929 году (!) и носил название кибернетический Тузик. Впервые встретил схему и описание робота в книге "Юный кибернетик" 1979 года. Книга мне попала в руки, когда мне было примерно 10 лет, и робот убил меня наповал своей супермегаложностью.
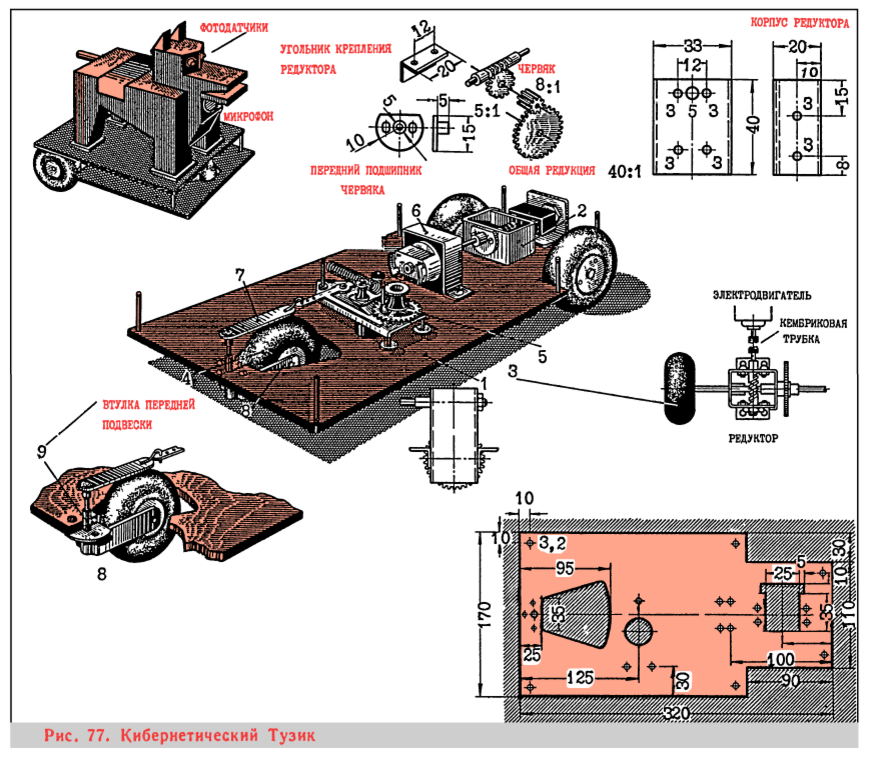
Только глядя на шасси робота невозможно отделаться от ощущения, что создатели книги разрабатывали роботов для захвата мира, а не для объяснения детям основ роботостроения.
Электрическую схему не буду даже приводить, она невероятно сложна и содержит сотни радиоэлементов. И единственное что робот умел, это ходить по линии. Что странно даже в то время, с имеющимися тогда в наличии транзисторами МП42, было возможно повторить предложенную ниже простейшую схему.
В детстве не хватало знаний, а потом не хватало времени, но тут помогла самоизоляция. Но вот беда под рукой слишком мало деталей для реализации задумки, а радиомагазин закрыт на карантин. На просторах интернета множество современных схем "простых" роботов. Простых в кавычках так-как для их реализации предлагают использовать Ардруино или микроконтроллеры. И даже сравнительно простые схемы содержат слишком много деталей. Я же решил упростить схему максимально и сделать её пригодной для повторения, даже тому, кто в первый раз взял в руки паяльник. В большинстве схем у подобных роботов 2 глаза-фотодадчика, мы же обойдёмся одним. И так схема.
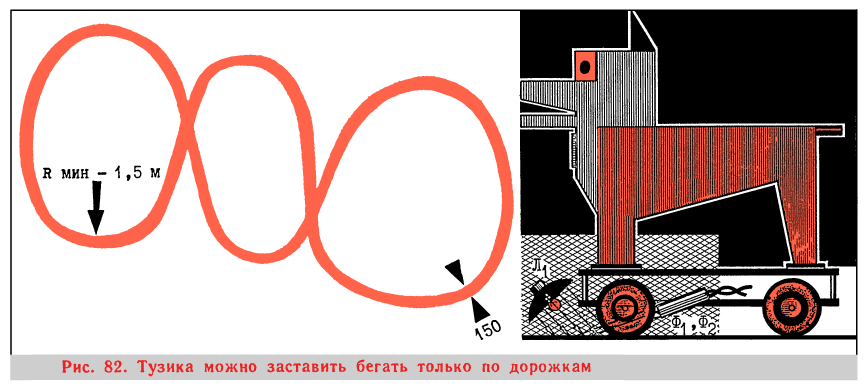
Я даже сам до сих пор не верю, что настолько простая схема работает, но факт остаётся фактом. Схема представляет собой подобие простейшего фотореле. Когда фотодадчик ФР1 "видит" чёрную линию количество принимаемого света мало и реле Р1 выключено, работает мотор М1 разворачивая робота в сторону белой бумаги. Попадая на белую бумагу фотодадчик открывает транзистор Т1, срабатывает реле Р1 и теперь работает мотор М2 разворачивая робота обратно в сторону к чёрной линии. Цикл бесконечно повторяется. По сути, робот не едет вперёд, а пытается повернуть то вправо то влево, из-за этого движение напоминает шаги, попеременно то правым, то левым колесом.
Моторы М1 и М2 любые от игрушек с редуктором понижающим обороты. Можно без проблем заказать с алиэкспресс. Я использовал бесшумные моторчики от неисправных новогодних переливающихся ламп. Стоит заметить, что чем медленнее движется робот, тем по более тонкой линии он способен ехать.
Шасси робота представляет собой два электромотора, один для правого колеса, другой для левого. Повороты осуществляются за счёт остановки одного из колёс, как в гусеничной технике.
Транзистор Т1 подойдёт практически любой биполярный транзистор малой мощности n-p-n структуры. Я применил КТ315. При замене на аналоги необходимо учесть что будет другая цоколёвка.
Резистор Р2 переменный и служит для настройки робота. Его значение нужно выставить именно так, чтобы робот различал чёрный и белый. Лучше использовать многооборотный переменный резистор.
Светодиод Д1 служит для подсветки и устанавливается вблизи фотодадчика ФР1. Но между ними нужно установить непрозрачный барьер для исключения засветки. Вместо барьера светодиод и фотодадчик можно обернуть изолентой или надеть на них термоусадочную трубку. Для ограничения тока на светодиоде до 3х вольт установлен резистор R1. Подойдёт любой, достаточно яркий, светодиод.
Реле Р1 подойдёт любого типа на ток срабатывания 3-5 вольт.
Батарея Б1 - 3 пальчиковые батарейки. Но можно использовать и аккумулятор от телефона.
Фотодадчик ФР1 - подойдёт любой фоторезистор или фотодиод. Фотодадчик и светодиод необходимо направить вертикально вниз.
Корпус робота выполнен из распределительной коробки, а для повышения интереса ребёнка к роботу на крышку прикрутил деталь от конструктора. Ниже на видео можно посмотреть робота в действии.
Подписывайтесь на канал. Буду и дальше рассказывать о интересном и необычном в Норильске. Поддержать проект и приобрести Сувениры можно в магазине Norgame.