Основные факторы при выборе выходного сигнала
При выборе типа энкодера и его выходного сигнала необходимо четко понимать какую величину необходимо контролировать. Это может быть:
· Скорость вращения;
· Направление вращения;
· Положение вала;
· Контроль XY-координат;
· Контроль приводов и т.п.
Из этих основных параметров могут вытекать частные случаи, например, контроль длины размотки катушек, для которого необходимо измерять скорость вращения и при этом четко отслеживать положение вала.
Для того, чтобы четко подобрать необходимый для вашей задачи выходной сигнал, нужно знать какими они могут быть и в чем их различие. На данный момент самыми популярными и используемыми типами энкодеров являются инкрементальные и абсолютные.
У каждого из этих видов свой тип сигнала:
· У инкрементальных энкодеров выходной сигнал представлен в виде импульсов с определенной частотой на оборот;
· У абсолютных энкодеров на выходе формируется уникальный бинарный код на каждый определенный угол поворота.
Далее рассмотрим каждый из типов сигналов отдельно.
Выходной сигнал инкрементального энкодера
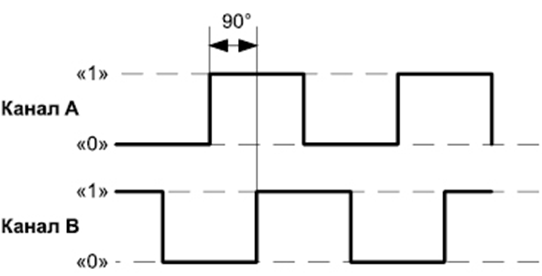
Выходным сигналом для инкрементального энкодера являются импульсы, количество которых за один оборот называется разрешением. Инкрементальные энкодеры обычно имеют 2 канала - А и В, по которым передаются импульсы. Между этими каналами имеется сдвиг на четверть фазы. Это сделано для того, чтобы можно было определить направление вращения вала. Так, если восходящий фронт А появляется перед В, то вал вращается по часовой стрелке. Против часовой стрелки вал вращается, если восходящий фронт В появляется перед А.
Некоторые инкрементальные энкодеры могут иметь дополнительный фронт Z. Этот импульс появляется всегда в одном и том же месте и служит как контрольная или базовая точка. Данная точка выдает один импульс за оборот в одном и том же месте, что позволяет отсчитывать количество оборотов и т.п. Для более высокой точности работы некоторые энкодеры имеют инвертированные сигналы /А, /В, /Z. Эти сигналы используются для проверки правильности передачи данных и устранения ошибок.
Электрическое подключение инкрементального энкодера
Электрическое подключение для конечного пользователя будет различаться лишь в количестве проводов, так:
· 4 провода – питание (+ и –), А и В фронт;
· 5 проводов – питание (+ и –), А, В и Z фронт;
· 8 проводов – питание (+ и –), A, B, Z и /A, /B, /Z фронта.
Также в зависимости от условий использования важно обратить внимания на тип выхода:
· 05A Совместимый линейный драйвер – высокая скорость передачи данных, защита от электрических помех, линии до 100 метров;
· 05K Push-pull с защитой от короткого замыкания – для подключения к компьютеру, небольшая скорость обмена до 200 кГц, защита от электромагнитных полей EMI;
· 24K Push pull защитой от короткого замыкания – для контроллеров с входами 24 В, длина линии до 20 метров, небольшая скорость обмена до 200 кГц;
· 25W Push-pull совместимый с защитой от короткого замыкания – подключение к контроллеру через коммутатор, линии до 100 метров, небольшая скорость обмена до 200 кГц;
· RS422 – высокая степень помехоустойчивости, высокая частота передачи;
· RS-485 – высокая скорость передачи, линии до 1200 метров;
· Sin-cos интерфейс – выхода А и В сдвинуты относительно друг друга на 90 градусов;
· SSI интерфейс – хорошие параметры электро-магнитной совместимости, требуется меньшее количество соединительных каналов, большое расстояние передачи данных;
· 4-20 мА интерфейс.
Выходной сигнал абсолютного энкодера
Выходным сигналом для абсолютного энкодера является уникальный двоичный код. При этом такой код формируется для каждого определенного угла поворота, а количество таких кодов называется разрешением абсолютного энкодера.
Выходной код состоит из N-количества бит. При вращении энкодера постоянно меняются значения этих бит, тем самым формируя коды.
Существует два основных способа кодирования выходного сигнала у абсолютных энкодеров это:
· Двоичный код – состоит из 0 и 1;
· Код Грея – двоичный код, в котором два соседних значения отличаются только одним разрядом.
Код Грея применяется для коррекции ошибок при высокой скорости оборотов.
Электрическое подключение абсолютного энкодера будет зависеть от его разрешающей способности и, соответственно, количества бит. Также играет роль интерфейс энкодера. Рассмотрим их:
1. Параллельно двоичный интерфейс – параллельная шина данных с определенной разрядностью. Например, для разрешения в 0,35 градуса потребуется 10 разрядов и, соответственно, 10 проводников.
2. Двоично-десятичный интерфейс – тот же что и 1 интерфейс только форматы чисел более удобны для восприятия человеком.
3. Код Грея – тот же что и 1 интерфейс только изменения происходят только в одном бите данных.
Для правильного выбора модели энкодера, обратитесь за консультацией к нашим специалистам. Их помощь позволит не только подобрать необходимый датчик, но также сэкономит материальные и временные ресурсы.
Оригинал статьи в нашей рассылке - подписывайтесь
Оставляйте комментарии.
Подписывайтесь на наш канал, чтобы не пропускать новые публикации.