Всем привет.
Запускаю серию статей про проектирование и сборку своего 3D принтера, не имея опыта и рук из плеч. Но для того чтобы начать, надо выбрать кинематику. Так как кинематика это фундамент, то подойти надо ответственно. Хотя по сути правильной кинематики не бывает. Есть задачи, которые требуют определенных характеристик. Скорость, точность, легкое обслуживание, печать большим ассортиментом пластиков, быстрый нагрев стола, термокамера.
Для себя я решил, что скорость хорошо, но не самое главное, хочется больше точности и печать всем чем можно, от резиноподобных пластиков, до каких то экзотических, например карбоноподобных.
Первое что пришло мне в голову это дельта принтер.
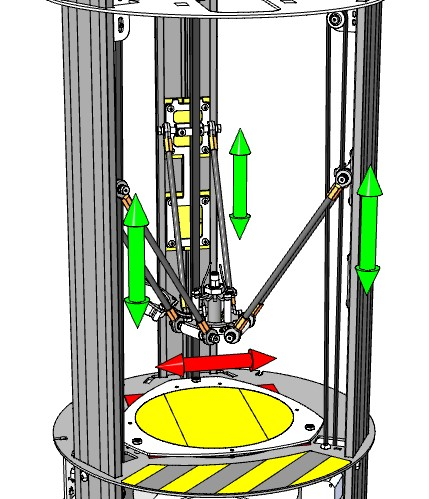
Суть его работ такая, что вращая валы изменяется высота каждого плеча, тем самым изменятся положение печатающей головы. Преимущества данного принтера высокая точность и большой объем по вертикали. Но недостатки тоже есть. В первую очередь это механика крепления головы. Зачастую хорошего решения нет. На магнитных подвесах быстро стирается шарик и получаем люфт. Не магнитные сразу люфтят. Тем более на магнитах есть риск срыва головы с крепления. В общем из за сложной конструкции и ее настройки я решил отказаться от данной конфигурации.
Дрыгостол - владею таким принтером, вполне себе рабочая кинематика. Но проблемы на лицо - тяжелый стол, который имеет инерцию, плюс это дает всякие неприятные эффекты типа ряби на итоговом качестве. Строить еще один не имеет смысла.

H-BOT - хорошая идея, стол только двигается вертикально, а голова по XY. Высокая скорость, высокая точность, но сложность исполнения и высокие требования к жесткости конструкции. Из недостатков - это длинный ремень и перекос из за чего направляющие быстро изнашиваются и появляется люфт. Суть работы такова, что два двигателя дергают один ремень и в зависимости от того в какую сторону каждый вращается, так и перемещается каретка и голова. Поэтому чем жёстче рама, тем лучше.
CoreXY - на вид это почти Hbot которого частично лишили недостатков. Тут два ремня и они короче. Ещё они так сделаны, что уменьшают нагрузку на направляющие и перекос слабее. Требование к раме меньше и при косяках работает стабильнее. В общем лучший кандидат на постройку.
Выводы: После написания статьи я определился, что буду использовать CoreXY для своего принтера. В нем меньше рисков плохо печатать.
Подписывайтесь на мой канал. Здесь я буду выкладывать истории связанные с 3D печатью. Как и что я делаю и моделирую. Расскажу о программе Fusion 360. Буду вести лог разработки нового большого принтера.
До новых встреч!