Первое, что хочется спросить, просматривая это видео — зачем? А потом — как? постараемся ответить на оба эти вопроса.
На самом деле, нет никаких причин, по которым умение чеканить мяч было бы полезным навыком для робота. С другой стороны, для выполнения этого действия требуется тщательная координация восприятия, вычислений и приведения в действие, что делает эту задачу такой же хорошей для тестирования роботизированной системы, как и любые другие.
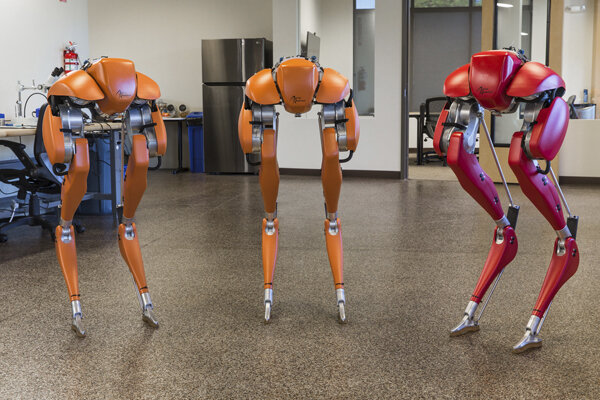
Робот Cassie Cal из Калифорнийского университета в Беркли, состоящий из двух ног и того, что можно было бы, с большой натяжкой, назвать туловищем, манипулирует мячом, одновременно поддерживая собственное равновесие. Действие требует динамической многозадачности, а возможно, готовит робота к выступлениям в цирке (подобно танцующему роботу Spot от Boston Dynamics).
Манипулировать мячом Cassie помогает внешняя система захвата движения, которая отслеживает местоположение мяча, но в остальном все происходит автономно. Робот может отбивать мяч, наклоняясь вперед и назад, влево и вправо, двигаясь вверх и вниз. Cassie делает это, сохраняя собственный баланс, который является главной целью этого исследования, т. е. успешно реализуя два динамических поведения, которые иногда могут противоречить друг другу. Конечная цель здесь в том, чтобы улучшить навыки робота, которые могут понадобиться ему для выполнения реальных задач.
Смотрите свежий выпуск новостей из мира высоких технологий: