
Робо-Симиан в финале конкурса DARPA "Вызов робототехнике".
С самого начала финала DARPA Robotics Challenge (DRC) было очевидно, что вождение автомобиля будет проблемой для участников соревнований роботов.
В прошлую пятницу на выставке Fairplex в Помоне, штат Калифорния, появились первые роботы, которые вышли на поле без модифицированной техники Polaris. Эти машины постепенно опускали его, используя свои ноги вниз по грязной полосе, имитирующей часть зоны бедствия, которая слишком опасна для людей.
Это оказалось довольно опасным и для роботов. Даже не сев в машины, эти команды уже проиграли в двухдневных соревнованиях, которые финансировал Пентагон.
В конкурсе, победители которого были определены по комбинации скорости и очков, они отказывались от целой четверти всех доступных очков и тратили долгие минуты на то, чтобы проехать по участку трассы, на который могло уйти пару минут. Еще хуже то, что большинство роботов в первой партии опрокинулись, дав Интернету первый вкус грядущих барабанов с падающими роботами-буперами. Эти команды проиграли финал сразу же после старта и продолжали отправлять машины, с которыми они работали годами, обратно на трассу, чтобы попасть в грязь снова и снова.
Роботы и вождение
Вот насколько плохо большинство роботов водят машины.
Большинство команд DRC, которые были достаточно смелы, чтобы поставить свои машины в автомобили, были вынуждены использовать по-настоящему сумасшедшие изобретения, чтобы сделать Polarises робота готовым.
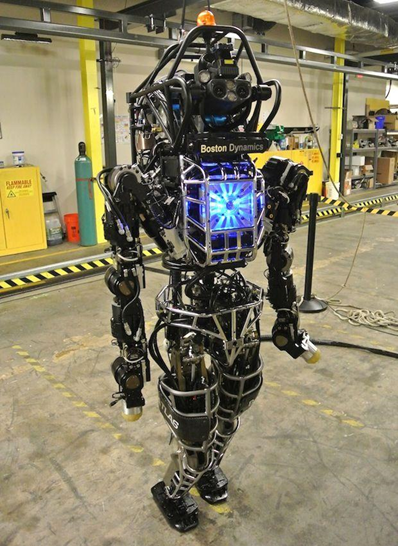
Робот Atlas, например, шестифутовый гуманоид высотой шесть футов, с двумя руками и двумя ногами. DARPA предоставила атласы нескольким командам, и среди двух десятков команд, вышедших в финал, шесть использовали собственные слегка модифицированные версии одного и того же робота.
И все же Атлас не мог сидеть за рулем, как все мы, гуманоиды. Отсутствие гибкости и громоздкая верхняя часть кузова с огромной батареей, напоминающей рюкзак, заставили его сидеть на пассажирском сиденье с задрапированными ногами на внешней стороне транспортного средства, что привело к тому, что он стал сидеть в боковом седле.
Неприятный конфуз
Это было только начало оскорблений Атласа. Достичь акселератора было непростой задачей, даже с длинными, обезьяньими руками робота. Поэтому Team TRACLabs оснастила Атлас верхней конечностью, эквивалентной колышковой ноге, деревянным пнем с прутом, который мог ткнуть педалью.
На самом деле, это не сама педаль, а деревянные блоки, которые команда расположила перед ускорителем.
Для управления Polaris компания TRACLabs построила еще более скрытую систему, соединив руль с куском дерева, который был прикреплен болтами к роликовой клетке автомобиля, по причинам, которые, несомненно, были гениальными, но непонятными для меня.
Другая команда Atlas каким-то образом управляла своим автомобилем, захватив собачью игрушку, прикрепленную к кабелям.
Манипулятор команды TRACLabs
Команда TRACLabs выбрала не захватывающий пень в DRC, чтобы нажать на акселератор автомобиля и повернуть дверные ручки.Erik Sofge
Среди прочего, роботы ДРК столкнулись с проблемой манипулирования. Восприятие также было проблемой, но только до определенной степени, так как транспортные средства имели ограничение скорости 10 миль в час, а вождение на участке маршрута представляло собой простую полосу грязи с тремя барьерами для навигации по Джерси.
Любая машина с лазерным дальномером - стандартный датчик для многих роботов, включая автомобили без водителя, - может воспринимать эту среду. Выход из Полярной звезды был огромным риском, и многие роботы, делая это, столкнулись с катастрофическими разливами нефти. Но именно способность физически управлять органами управления требовала от большинства команд, включая CHIMP Университета Карнеги-Меллон, участия MacGyver.
Несмотря на смутно человеческие манипуляторы с тремя пальцами, способные захватить дверную ручку или электроинструмент (которые были двумя из восьми задач в конкурсе), роботу было легче управлять тем, что не было создано для манипулирования вообще. CHIMP повернул Полярную звезду, прижав резиновую дорожку к рулю, прижав ее к рулевому колесу, и запустив вперед или назад.
Обычно этот трек используется совместно с тремя другими треками робота, когда он разъезжает на четвереньках. Но в автомобиле он стал импровизированным захватом, в то время как два захвата CHIMP остались неиспользованными. У робота CMU также был специальный рычаг для достижения педалей, который отсоединялся от его ноги после использования.
Когда люди видят робота за рулем машины, они сбиты с толку."
Несмотря на все эти обходные пути, они также являются признаком удивительно медленного прогресса роботизированных манипуляций. Когда в 2012 году было объявлено о деталях DRC, вождение казалось странной, но неотъемлемой частью соревнований. Питание от батарей для больших роботов ограничено - чем больше батарейных элементов, тем больше вес, что всегда проблематично - и машины, которые реагируют на стихийные бедствия, не должны расходовать ограниченное количество энергии, гуляя, ползая или катаясь на протяжении длительного периода времени по маршруту их назначения. Предлагаемое DARPA решение простое: захватить транспортное средство. Человеческие группы реагирования на краю зоны бедствия могут помочь ботам сесть в машину и отправить ее в бой. Как только робот не сможет ехать дальше из-за мусора или необходимости входить внутрь, он будет двигаться дальше, используя встроенную мобильность. И сделав вождение и эвакуацию (выход из машины) двумя отдельными задачами, представляющими собой две из восьми возможных задач, которые команды могут получить в финале DRC, DARPA также подчеркнула цель конкурса - разработать роботов, способных работать в условиях, которые не были специально созданы для них. И поскольку электроинструменты были еще одной частью соревнования, вам не нужно было быть роботом-манипулятором, чтобы представить себе кучу машин с ловкими, похожими на человека руками, подобно пятипалым манипуляторам на робота NASA.
Но единственным роботом на финале ДРК с пятью руками была команда NEDO-Hydra's, которая не участвовала в соревнованиях, потому что не была закончена. Вместо того, чтобы подталкивать команды к продвижению этого уровня техники в манипулировании, DARPA продолжала опускать штангу, снижая ее с Sawzalls до сверления, инструмент, который никто не будет использовать для прорезания больших отверстий в стене, и позволяя все больше и больше модифицировать машины.
В результате большинство роботов получили ограниченную гибкость нижней части тела, у большинства из них было три пальца и очень мало сочленения для работы. Они использовали когти, в основном. Это привело к повсеместному бесчеловечному и неэффективному захвату электроинструментов.
Для того, чтобы вырезать отверстие в стене, многие роботы должны были держать сверло боком, используя эквивалент большого пальца, чтобы нажать на курок. У робо-симиана НАСА вообще не было пальцев, а было две пары запятых крючков в форме запятой на конце конечностей. Крючки поворачиваются вперед только при необходимости.
В общем, надежды не оправдались в должной степени. И разработки продолжаются
