При применении колесного варианта движения разработчики роботов исходят из того, что колеса не должны скользить по поверхности. Альтернативная форма рулевого управления, называемая скольжение/скольжение, может быть использована для переориентации робота путем вращения колес, направленных в одном направлении с разной скоростью или в противоположных направлениях.

Так работает армейский танк
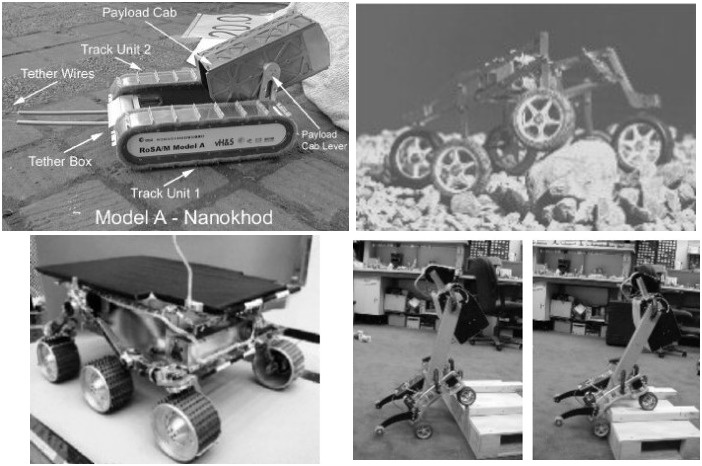
Армейский танк работает таким образом, и "Наноход" (на коллаже верхний слева) является примером мобильного робота, основанного на той же концепции. Роботы, использующие протектор, имеют гораздо большую площадь контакта с поверхностью земли, и это может значительно улучшить их маневренность на неровной поверхности по сравнению с обычными колесными моделями. Однако из-за большей площади контакта с землей изменение ориентации робота обычно требует поворота на скольжение, в результате чего большая часть трассы должна скользить по рельефу.
Недостатки гусеничного скольжения
Недостатком таких конфигураций является то, что они связаны с управлением скользящим/скользящим механизмом. Из-за большого проскальзывания во время поворота трудно предсказать точный центр вращения робота, а также точное изменение положения и ориентации также может изменяться в зависимости от трения о землю. Поэтому теоретические расчеты на таких роботах крайне неточны.
Это компромисс, который достигается в обмен на чрезвычайно хорошую маневренность и тягу на пересеченной и неровной местности. Кроме того, скольжение/проскальзывание на поверхности с высоким коэффициентом трения позволяет быстро преодолеть крутящий момент используемых двигателей. С точки зрения энергоэффективности этот подход достаточно эффективен на пересеченной местности, но крайне неэффективен в остальном.
Для пересеченной местности
Ходовые роботы могут обеспечить наилучшую маневренность на пересеченной местности. Однако они неэффективны на ровной поверхности и требуют сложного управления. Интересным компромиссом являются гибридные решения, сочетающие в себе адаптивность ног с эффективностью колес. Решения, которые пассивно адаптируются к рельефу местности, представляют особый интерес для полевой и космической робототехники.
Робот Sojourner компании NASA/JPL (на коллаже нижний слева) представляет собой такое гибридное решение. Этот робот способен преодолевать объекты размером до колес.
Что такое робот «Креветки»
Недавно EPFL выпустила более современную конструкцию мобильного робота для аналогичных приложений (на коллаже верхний справа). Этот робот, получивший название "Креветки", имеет шесть моторизованных колес и способен подниматься на объекты в два раза больше диаметра колес. Это позволяет ему подниматься по обычной лестнице, хотя робот небольшой.
В конфигурации с ромбами «Креветки» имеют рулевое колесо спереди и сзади, а также два колеса, расположенных на тележке с каждой стороны. Переднее колесо имеет пружинную подвеску, которая гарантирует оптимальный контакт всех колес с поверхностью земли в любое время. Управление осуществляется путем синхронизации рулевого управления передними и задними колесами и разницы скоростей тележки.
Это позволяет выполнять высокоточные маневры и поворачиваться на месте с минимальным проскальзыванием/соскальзыванием четырех центральных колес. Использование параллельных сочленений передних колес и тележек создает виртуальный центр вращения на уровне оси колеса. Это обеспечивает максимальную устойчивость и восхождение даже при очень низком коэффициенте трения между колесом и землей.
Подъемная способность «Креветок» необычайна по сравнению с большинством роботов аналогичной механической сложности, во многом благодаря особой геометрии и, следовательно, способу перемещения центра массы (COM) робота по отношению к колесам с течением времени.
Робот сам поднимается на выступ
В отличие от этого, Personal Rover демонстрирует активное смещение на подъемные выступы, которые также в несколько раз превышают диаметр колес (на коллаже нижний справа). Большая часть веса Personal Rover приходится на плечи верхней части его маятниковой стрелы. Специальный двигатель приводит штангу в движение для изменения распределения веса спереди и сзади для облегчения подъема по лестнице. Поскольку эта схема сдвига активна, контур управления должен четко определять, как перемещать штангу во время подъема. В этом случае Personal Rover выполнил это управление замкнутым контуром, проезжая по местности, основываясь на измерениях тока, протекающего на каждое независимое ведущее колесо.
По мере развития исследований в области мобильной робототехники мы становимся способными разрабатывать более сложные механические системы. В то же время проблемы управления обратной кинематикой и динамикой настолько легко преодолеваются, что эту сложную механику в целом можно контролировать.
Таким образом, в ближайшем будущем можно ожидать увидеть большое количество уникальных, гибридных мобильных роботов, которые объединяют в себе преимущества нескольких основных механизмов движения. Каждый из них будет впечатляющим с технологической точки зрения, и каждый будет спроектирован как специальный робот для своей особой экологической ниши.