
Роботосоздатели создают роботов на различном количестве ног – одной, двух, трех и четырех. Казалось бы, что на четыре ногах – это решение всех проблем. Однако это не совсем так. Хотя стоять неподвижно на четырех ногах для робота достаточно легко, ходьба остается для него сложной задачей, поскольку для сохранения устойчивости центр тяжести робота должен быть активно смещен во время походки.
Робот AIBO – почти собака на четырех ногах
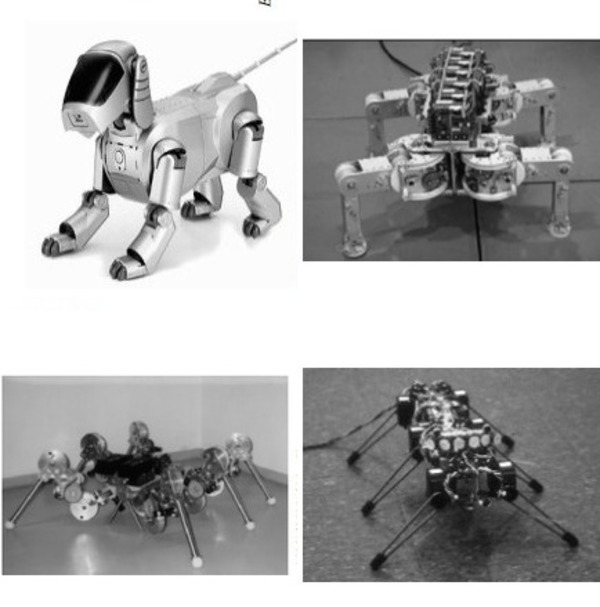
Недавно компания Sony инвестировала несколько миллионов долларов в разработку четырехногого робота под названием AIBO (на коллаже верхний слева). Для создания этого робота компания Sony выпустила как новую операционную систему робота, работающую практически в режиме реального времени, так и новые редукторные серводвигатели, обладающие достаточно высоким крутящим моментом для поддержки робота, но при этом способные работать в обратном направлении в целях безопасности.
В дополнение к разработке собственных двигателей и программного обеспечения компания Sony внедрила систему цветного зрения, которая позволяет AIBO преследовать ярко окрашенный шар. Робот может работать не более одного часа, прежде чем потребуется перезарядка. Первые продажи робота были очень активными: за первый год было продано более 60 тыс. единиц.
Тем не менее количество двигателей и инвестиции в технологии, стоящие за этой роботизированной собакой, привели к очень высокой цене - около $1500. Четырехногие роботы потенциально могут служить эффективными объектами для исследования взаимодействия человека и робота (верхний справа).
AIBO как домашнее животное
Люди могут обращаться с роботом Sony, например, как с домашним животным и могут развивать эмоциональные отношения, подобные отношения между человеком и собакой. Кроме того, компания Sony разработала стиль ходьбы и общее поведение AIBO, чтобы имитировать обучение и созревание, в результате чего динамичное поведение с течением времени становится более интересным для владельца, который может отслеживать изменения в поведении. По мере решения проблем, связанных с высокими требованиями к аккумулированию энергии и двигательной технике, существует вероятность того, что четырехногие роботы, обладающие гораздо большей производительностью, чем роботы AIBO, станут обычным явлением во всех сферах жизнедеятельности человека.
А вот в Токийском технологическом институте разработали робота на четырех ногах, назвав его Титан VIII (нижний слева). Вес его - 9 кг, высота – 25 см.
Робот о шести ногах…
Шестиножие конфигурации были чрезвычайно популярны в мобильной робототехнике из-за их статической устойчивости во время ходьбы, что позволило снизить сложность управления (нижний справа). В большинстве случаев каждая нога имеет три степени свободы, включая сгибание бедер, сгибание колена и похищение бедер.
Genghis - это коммерчески доступный робот для хобби с шестью ногами, каждая из которых имеет две степени свободы, предоставляемые сервоприводами. Такой робот, движение которого состоит только из сгибания бедра и захвата бедра, обладает меньшей маневренностью на пересеченной местности, но хорошо работает на ровной поверхности. Так как он состоит из простого расположения серводвигателей и прямых ног, такие роботы могут быть легко собраны любителем роботов.
Пару слов о насекомых
Насекомые, которые, пожалуй, являются самыми успешными движущимися существами на земле, превосходно преодолевают все формы местности с шестью ногами, даже перевернутыми вверх дном.
В настоящее время разрыв между возможностями шестиногих насекомых и искусственных шестиногих роботов все еще достаточно велик. Интересно, что это не связано с отсутствием достаточного количества степеней свободы у роботов. Вместо этого насекомые сочетают небольшое количество активных степеней свободы с пассивными структурами, такими как микроскопические шипы и текстурированные подушечки, которые значительно увеличивают силу захвата каждой ноги.
Роботизированные исследования таких структур пассивных наконечников только недавно начались. Например, исследовательская группа пытается воссоздать полную механическую функцию ноги таракана.
Из приведенных выше примеров ясно, что роботы, прошедшие обучение, должны добиться значительного прогресса, прежде чем смогут конкурировать со своими биологическими аналогами. Тем не менее в последнее время были достигнуты значительные успехи, в первую очередь благодаря прогрессу в проектировании двигателей.
К сожалению, как видим мы из вышеприведенных примеров, человечеству пока далеко до роботов, повторяющих в точности тех, по чьему образу и подобию они создаются. Создание систем управления, приближающихся к эффективности мышц животных, остается недоступным для робототехники, равно как и накопление энергии с плотностью энергии, характерной для органических форм жизни. А жаль...