Преобразователь/датчик давления
Это устройство, преобразующее давление среды - то есть силу, с которой эта среда давит на мембрану датчика - в электрический выходной сигнал, который по соединительным проводам поступает на управляющий прибор (ПЛК, регулятор типа ТРМ и т.п.). Обычно выходной сигнал таких преобразователей аналоговый непрерывный. Чаще всего это 4...20 миллиАмпер (“токовая петля”) или 0...10 Вольт (“3-х проводный”). Также рынок потихоньку начинают завоевывать преобразователи с цифровыми интерфейсами - например, с RS-485. Небольшой анонс: скоро у ОВЕН появится датчик давления ПД100И с таким интерфейсом “на борту”.
Типы измеряемых давлений
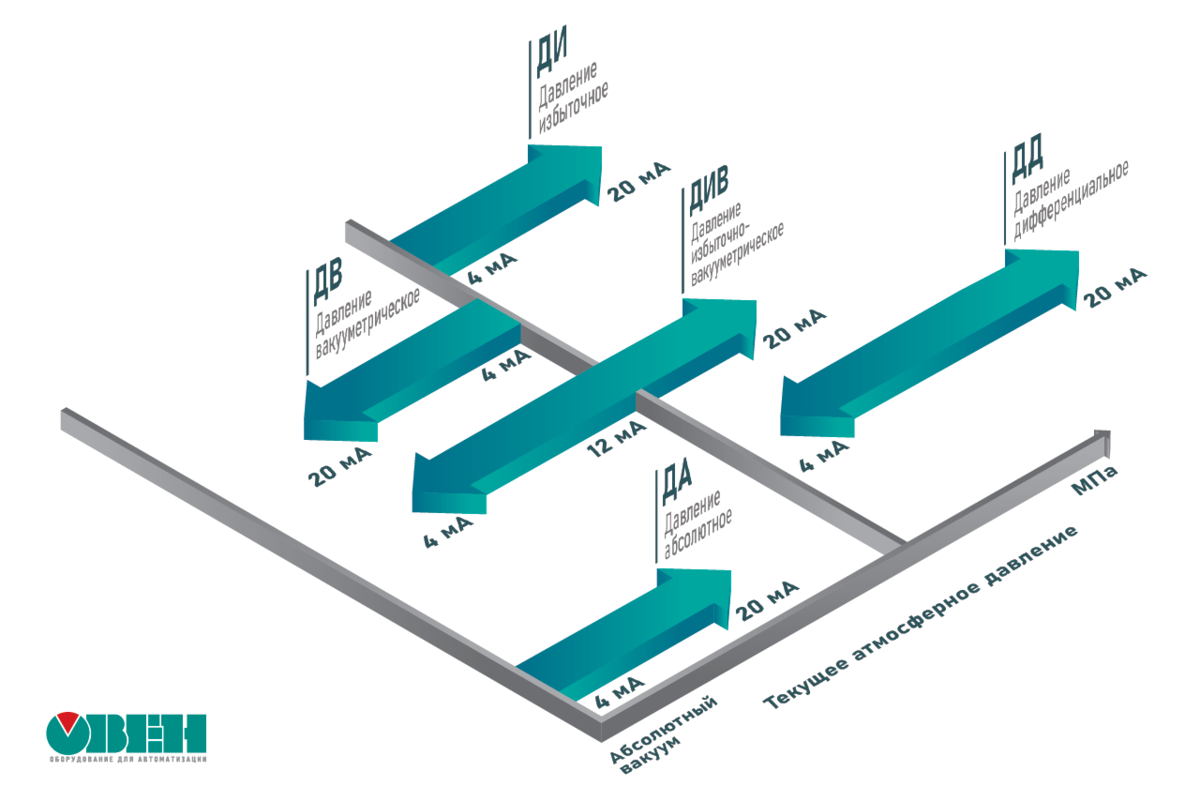
- Избыточное давление ДИ – это дополнительно созданное относительно атмосферного давление («наддув», «напор») в измеряемом процессе. Это самый распространенный вид давления - оно присутствует и в батареях отопления, и в кофемашинах, и в паровых котлах на ТЭЦ. И везде его требуется измерять :)
- Давление вакуумметрическое ДВ – это созданное относительно атмосферного давления разрежение («тяга») в измеряемом процессе. Например, в дымоходах котельных и коробах вентиляционных систем торговых центров.
- Давление избыточно-вакуумметрическое ДИВ – это когда давление в процессе может быть то ниже атмосферного, то выше (т.н. “тягонапорометрия”). Такое давление измеряется, например, непосредственно в котлах котельных.
- Дифференциальное давление ДД - разница между давлением в любых двух точках измеряемого процесса. Этот тип измерений не зависит и не привязан к атмосферному давлению. Часто в промышленности с помощью такого давления измеряют расход жидкости или ее уровень в ёмкостях с избыточным давлением.
- Абсолютное давление ДА - созданное относительно абсолютного (космического) вакуума давление («наддув») в измеряемом процессе. Абсолютное давление измеряется в “особых” случаях, когда требуется исключить влияние атмосферы на измерения - узлы учёта газа на границах государств, стенды испытания двигателей самолётов и т.п.
Погрешность преобразования
Конечно, у всех датчиков давления есть погрешность. То есть они измеряют давление с ошибкой, указанной производителем. Будьте внимательны: серьезные производители всегда указывают суммарную погрешность измерения своих датчиков. Если такой информации в паспорте изделия или на его бирке не найти, возможно, это подделка или датчик низкого качества с непредсказуемыми показаниями. Не дайте себя обмануть!
Рассмотрим виды погрешностей и факторы, влияющие на погрешность.
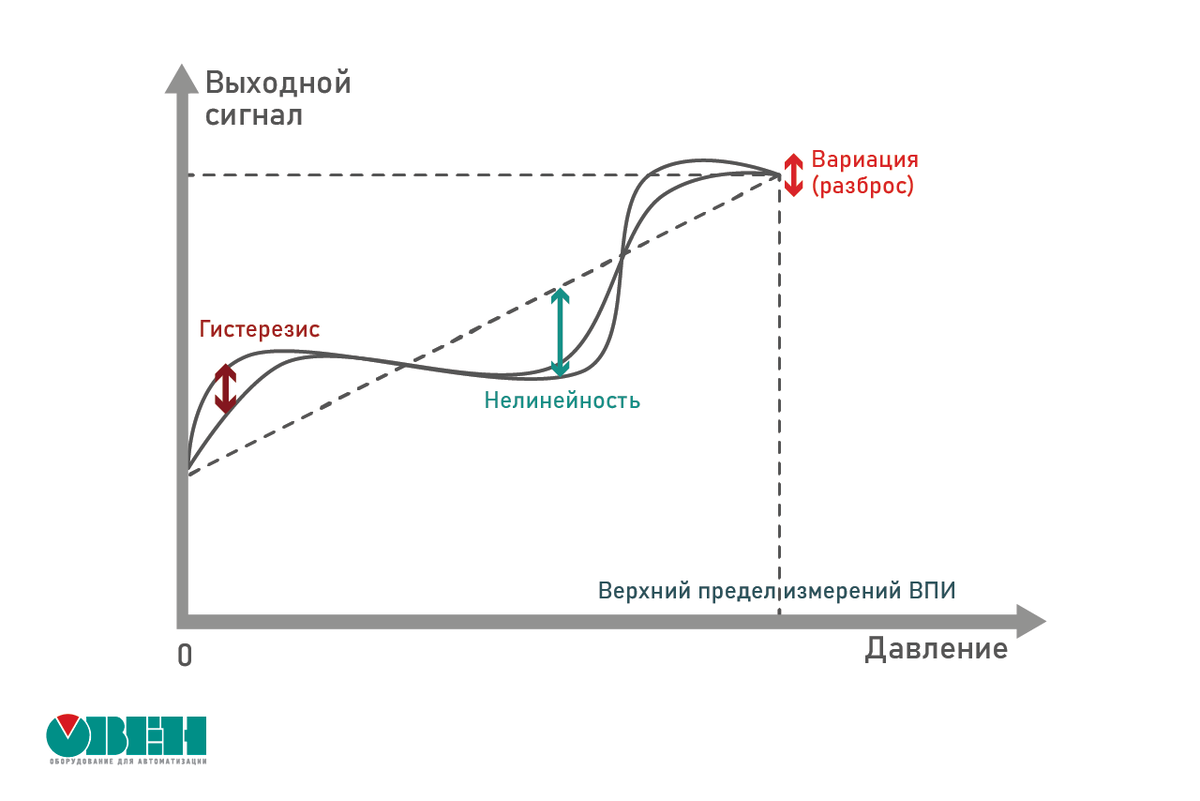
От измерительного преобразователя (датчика) давления в идеале необходимо получить линейную функцию преобразования давления в ток (наклонная пунктирная линия на рисунке).
Но сенсоры давления даже лучших производителей имеют весьма далёкий от идеала выходной сигнал (сплошные линии на рисунке). Существуют три основные составляющие погрешности:
1. Нелинейность – максимальное по модулю отклонение сигнала реального сенсора от идеальной линейной.
2. Повторяемость (воспроизводимость, вариация) – разный выходной сигнал сенсора при повторяющемся одинаковом входном воздействии. Повторяемость максимальна в точке ВПИ (верхнего предела измерения).
3. Гистерезис - разный выходной сигнал при прямом и обратном направлении изменения входного воздействия (давления среды на мембрану датчика).
Обычно повторяемость и гистерезис трудно компенсировать - это свойства качества сенсора, а нелинейность практически полностью убирается нормированием-калибровкой.
Теперь сложим эти три источника – три составные части погрешности – получится суммарная абсолютная погрешность. Но такая величина неудобна в использовании, поскольку для сравнения погрешностей разных датчиков придётся сравнивать различающиеся в сотни раз диапазоны и пересчитывать физические величины давлений МПа –кгс/см2 – атм – psi - м.в.с - …, в которых эта погрешность будет выражаться.
Поэтому принято эту суммарную абсолютную погрешность делить на величину верхнего предела измерения (ВПИ, диапазона) и умножать на 100% - получается суммарная относительная погрешность. Которой производители и «меряются», у кого преобразователи давления лучше: чем точнее преобразование (меньше погрешность преобразования), тем датчик считается лучше и продается дороже. Объединение ОВЕН прямо указывает суммарную основную погрешность в кодировке датчиков.
В данный момент на рынке в основном присутствуют датчики с основной погрешностью от 1,0% до 0,1% ВПИ.
Основная погрешность всеми производителями гарантируется только при так называемых нормальных условиях работы преобразователя давления: температура +23 (+/-5) °C, влажность 60%, атмосферное давление 760 мм.рт.ст, отсутствие вибраций и электромагнитных полей кроме гравитационного.
При любых изменениях условий всегда возникают дополнительные погрешности (самая заметная из которых - температурная), увеличивающие погрешность показаний преобразователя давления иногда в несколько раз. Отсутствие в заявляемых характеристиках дополнительных погрешностей должно настораживать покупателя.
ПО «ОВЕН» гарантирует, что дополнительная температурная погрешность у преобразователей давления ПД100 и ПД150 не превышает 0,2% на 10 °C , а у ПД200 не более 0,1% на 10 °C . Это обеспечивается дополнительным циклом калибровки преобразователей при +80 °C при их производстве, в процессе которого обеспечивается микропроцессорная термокомпенсация дополнительных погрешностей.
Чем преобразование в датчике «независимее» от внешних причин (температуры, времени работы, электромагнитных помех и т.п.) – тем датчик стабильнее и дороже. Сейчас на рынке присутствуют датчики с межповерочным интервалом и/или гарантией от 1 до 5 лет, что означает: в течение этого времени датчик останется в заявленных в документах границах погрешности.
Автор статьи: Антон Колеров