Традиционная хирургия требует достаточно большого вмешательства, чтобы хирург мог поместить инструменты непосредственно в оперируемую зону. Чаще всего повреждения кожи, мышц, соединительной ткани и костей приводят к гораздо большим травмам, чем сама лечебная процедура. Это приводит к увеличению боли, времени выздоровления и осложнениям, вызванным хирургической травмой. Ускоряется тенденция к минимально инвазивной хирургии (МИС), при которой ненужные травмы ограничиваются уменьшением размера разрезов до менее чем 1 см или использованием катетеров, или эндоскопов с резьбой через всевозможные трубчатые структуры. Микромеханические технологии обладают огромным потенциалом для обеспечения доступа в недоступные в настоящее время зоны или для расширения возможностей хирурга в тех областях применения, где современные малоинвазивные технологии не позволяют в полной мере задействовать человеческую ловкость и восприятие. Кроме того, они могут даже расширить возможности хирурга на большие расстояния с помощью телехирургии.
Таким образом, в данной статье будет предпринята попытка унифицировать область микромехатроники для МИС и показать, как технологии могут улучшить здоровье пациента путем повышения эффективности работы хирурга.
Преимущества
Улучшенный доступ:
Основные преимущества МИС включают в себя снижение травматизма, уменьшение боли и сокращение времени восстановления для пациента. Другая сторона МИС, заключается в том, что это минимальный доступ к хирургическому вмешательству. Ограниченный доступ снижает ловкость рук и восприятие, увеличивает нагрузку и вероятность ошибок, а также удлиняет время процедуры. Микромехатроника обладает потенциалом для улучшения доступности СУИ.
Повышение ловкости рук:
Хотя человеческая рука поражает своими возможностями, в микрохирургии могут возникнуть ошибки с летальным исходом, вызванные усталостью и стрессом. Реконструкция сосудов и нервов для восстановления поврежденных конечностей - это медленный процесс, требующий постоянного внимания и точных движений. Усталость можно уменьшить с помощью систем с телеуправлением, в которых движения хирурга уменьшаются.
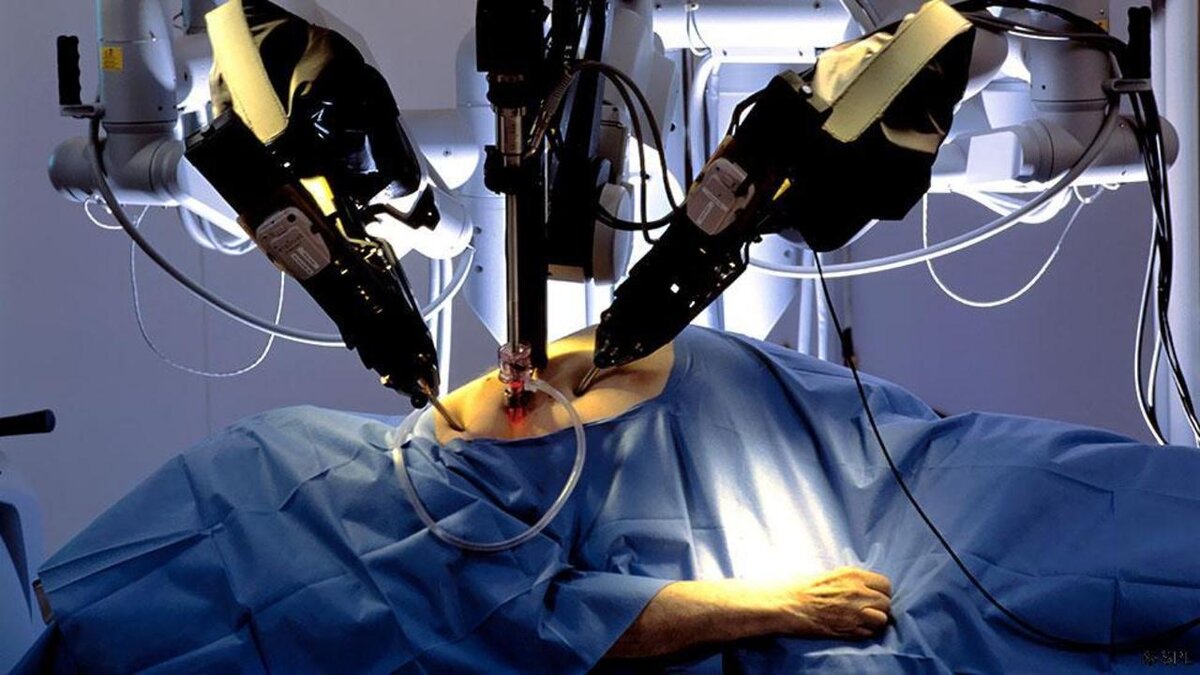
Даже когда движение в относительно удобном масштабе составляет несколько миллиметров или сантиметров, ловкость в МИС часто снижается механическими ограничениями. Например, в лапароскопической хирургии, или МИС брюшной полости. Длинные инструменты, вставляемые через канюли диаметром 20-10 мм, ограничиваются точкой опоры, где канюля проходит через брюшную стенку. Это сокращает количество возможных движений, значительно увеличивая сложность выполнения ловких операций, как при ушивании или связывании узлов.
Улучшенное восприятие:
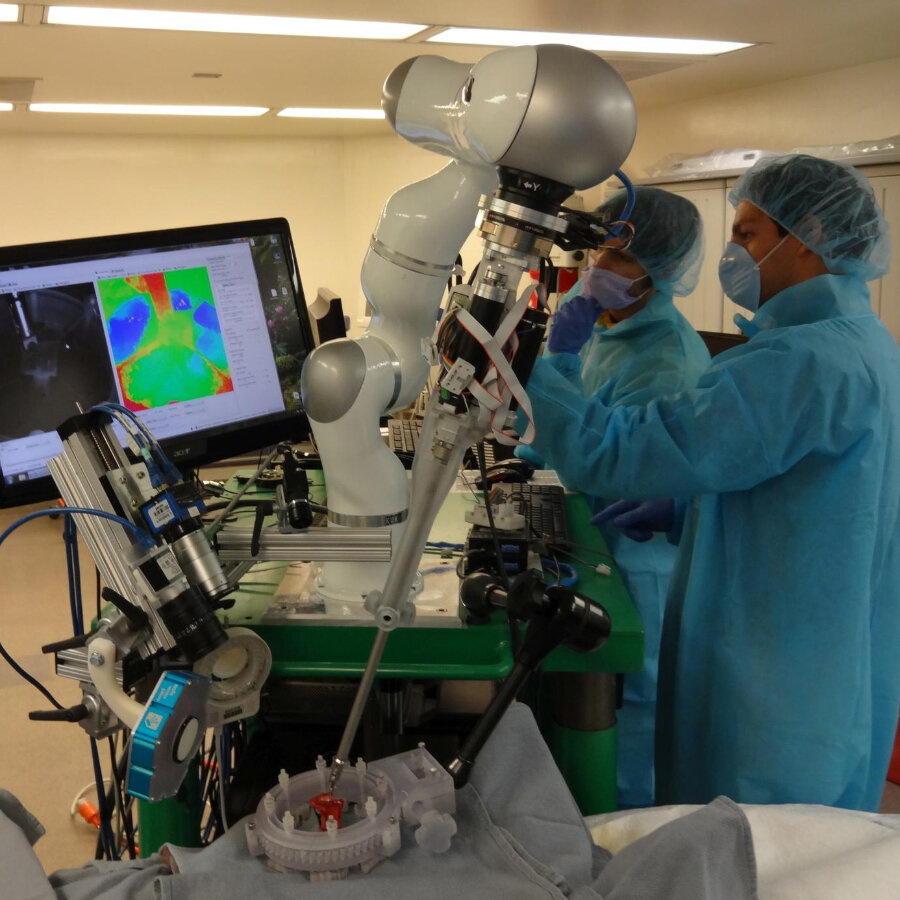
Значительный прогресс в области МИС был достигнут с момента внедрения камер с малой зарядной связью (ПЗС), что позволяет получать видеоизображение с эндоскопов с оптоволоконными кабелями. Недостатком видеоскопической хирургии является то, что изображение обычно двумерное, имеет оптические и перспективные искажения и имеет визуальные координаты, смещенные относительно координат прибора. Контролируя относительную ориентацию эндоскопа и ведомого манипулятора, а также дисплея, можно поддерживать хорошее соответствие управления дисплеем.
Хирурги обнаруживают скрытые структуры в обычной открытой хирургии, чувствуя их. Распределение давления при работе с тканями позволяет определить, когда ткань может быть повреждена в результате чрезмерного местного напряжения. Эти ощущения могут быть восстановлены с помощью тактильного датчика, установленного на приборе, и дисплея, который обеспечивает такое же распределение, как и кончики пальцев хирурга. Аналогичным образом, катетер или эндоскоп с набором датчиков давления может позволить навинчивать катетер по пути наименьшего сопротивления, снижая вероятность повреждения стенок сосуда или трубки. Все это примеры использования кинестетической обратной связи, которую может обеспечить микроманипулятор.
Создание доступа:
Некоторые участки тела в настоящее время недоступны из-за ограничений, связанных с пассивными устройствами. Существующие эндоскопы не могут достичь середины 70% желудочно-кишечного тракта, для этого может потребоваться локомотивное устройство. Аналогичным образом, усилия, необходимые для установки катетеров в длинные, извилистые или разветвленные сосуды, могут привести к их повреждению, но при наличии соответствующих датчиков и активного сгибания они могут быть более безопасными.
Удаленная хирургия
Другой основной потребностью в мехатронике хирургии является удаленная телехирургия. В данный момент, если пациент в отдаленном районе нуждается в специализированной помощи, его следует перевезти в другой город или страну, где такая помощь доступна. Если действия и чувства эксперта могут быть эффективно переданы дистанционно, пациенту не придется подвергаться риску перемещения. Текущие малоинвазивные приборы уже выступают в качестве пассивных "передатчиков" между хирургом и "удаленной" средой внутри пациента. Активные микромеханические устройства позволят осуществлять электронную передачу данных через существующие средства связи и сетевые средства массовой информации, что позволит проводить действительно удаленные процедуры.
Разумеется, телехирургия сопряжена с рисками, особенно если отказ оборудования может привести к ситуациям, с которыми не сможет справиться персонал, работающий в отдаленных районах. Однако, местный хирург имеет опыт, но нуждается в помощи на определенных этапах специализированной процедуры, с которыми он нечасто сталкивается. Это особенно актуально сейчас, когда технологии и методы лечения быстро меняются в связи с введением новых методик. Если совет специалиста необходим только на определенных этапах процедуры, телесинхронизация является практичной. В таких ситуациях эксперту необходим только доступ к информации, отображаемой местным хирургом, такой как видео, изображения или тактильные дисплеи. Телементоринг уже был продемонстрирован в лапароскопической хирургии, где эксперт может контролировать движение лапароскопа с помощью роботизированного манипулятора.
Вместо вывода
Быстрыми темпами внедряются и развиваются волнующие технологии микроприводов и датчиков. Существует явная потребность в усовершенствованных технологиях в СУИ. В статье был представлен обзор многих из рассматриваемых проблем и путей их решения, которые требуют разработки не только новых устройств, но и целых систем, расширяющих возможности человека по выполнению процедур с меньшим риском и травматизмом для пациента.