Dans quelle mesure l'environnement dans lequel se trouve le robot est-il sûr ? Quels outils utilisez-vous ? Telles sont également les questions auxquelles nous sommes confrontés. Nous sommes d'avis que nous ne pouvons laisser la responsabilité de la sécurité d'un système robotique aux seuls intégrateurs ou opérateurs - nos clients.
Nous ne sommes satisfaits que lorsque le robot est sûr dans son application spécifique. On se demande comment les humains approchent les robots. Si on les interprète généreusement, presque tous les robots sont en mesure de gérer la MRK. On distingue quatre variantes :
Le robot s'arrête lorsque la porte de sécurité du robot est ouverte. Tout ce dont vous avez besoin est une entrée de sécurité (si nécessaire un relais de sécurité) qui arrête le robot lorsqu'il entre.
Si le robot doit être guidé manuellement, en plus de l'entrée de sécurité, un commutateur de validation à trois niveaux et une surveillance de vitesse de sécurité sont nécessaires. (Dans certaines applications, une surveillance de sécurité de l'orientation est également requise.)
Si un capteur de sécurité peut être utilisé pour déterminer la position humaine (c'est-à-dire en toute sécurité), il est permis de réduire la vitesse du robot en fonction de la distance entre l'homme et le robot, de sorte que le robot soit toujours debout lorsque l'homme y arrive. Pour cela, le robot a besoin des fonctions de sécurité "Surveillance de vitesse de sécurité" et d'une entrée de sécurité pour le bouton d'arrêt d'urgence. Tous les systèmes robotiques MRK précédents sont basés sur la prévention des collisions.
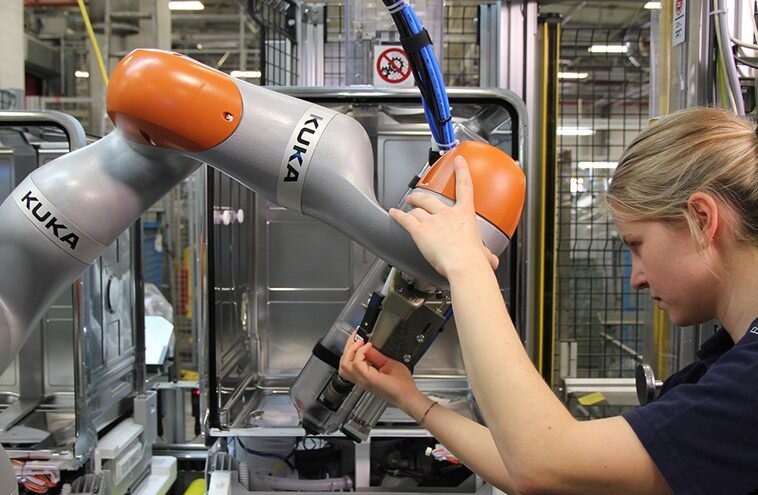
La discipline suprême et la véritable collaboration homme-machine est le contrôle des collisions ("limitation de puissance et de force"). Ici, le robot peut interagir avec l'être humain, l'être humain peut toucher le robot, le conduire et même entrer en collision avec lui si nécessaire. Des fonctions telles que la détection sûre des collisions ou la surveillance des forces de sécurité doivent désormais être utilisées pour garantir que les forces et les pressions restent inférieures aux limites de sécurité définies dans toutes les situations opérationnelles en cas de collision. En bref, le robot ne blesse pas les gens.
Une fois que le type d'utilisation du robot a été clarifié, il faut se demander si le robot offre les fonctions de sécurité nécessaires. Chez KUKA, par exemple, ce sont les suivants :
-Détection fiable des collisions
-Surveillance des forces de sécurité
-Zones de travail sûres et sécurisées
-Surveillance de la position de sécurité
-Surveillance de la vitesse de sécurité
-Entrées et sorties sécurisées
-Détection fiable des outils
Surveillance de l'orientation en toute sécurité
Commutation d'état sécurisée vous permettant de passer d'une stratégie de sécurité à l'autre dans une application.
KUPA a également fait certifier ces fonctions de sécurité selon DIN EN ISO 13849 PLd Kat3 et DIN EN 62061 : SIL 2. Les fonctions de sécurité se composent de sous-composants tels que les capteurs, l'électronique d'exploitation, la communication et la commande. Tous les composants contribuent à la fonction de sécurité et doivent tous être certifiés.
L'étape suivante consiste maintenant à concevoir le robot en toute sécurité dans sa zone de travail. Les fonctions de sécurité telles que la détection des collisions ou la surveillance des forces sont-elles efficaces dans toute la zone de travail du robot ? Comment résoudre ce problème si la précision de mesure est limitée ou inexistante à certains points de la zone de travail et à certains points de la structure du robot ? La sécurité est-elle toujours garantie ?
Il s'agit ensuite de la précision de la mesure de force dans la technique de sécurité. Si, par exemple, une limite de force de 120N est spécifiée, il ne suffit pas que le robot soit capable de mesurer de manière fiable avec une précision de seulement 130N. S'il mesure avec une précision de 110N, le robot ne pourrait presser qu'avec 10N, ce qui limiterait le champ d'application.
La capacité de charge d'un robot doit également être testée. Les robots sensibles et sûrs sont équipés d'une technique de mesure, mais ils doivent rester robustes. Il est donc important de savoir quelle est l'expérience de la résistance d'un robot et comment elle a été testée, qu'elle soit vide, partiellement chargée ou complètement chargée.
Pour répondre à la question introductive : le robot est une machine et l'être humain est responsable de sa sécurité. Personne ne doit avoir peur d'une collaboration homme-machine bien protégée.