И так, продолжаем разговор про роботизированный хвост Arque, который придумали в Японии:
"Разработчики, конечно же, брали пример из природы. Но не сразу догадаешься какой именно хвост они взяли за образец.
- Мне нравится хвост кенгуру! Такой хвост помогает далеко прыгать, и, при желании, на нем можно посидеть - сразу же заявил мой собеседник.
- Мне тоже кажется, что хвост у кенгуру самый мощный. Но кенгуру водятся в Австралии, в Японии их нет.
Японцам очень близок мир моря, поэтому присмотревшись к нему, они выбрали в качестве прототипа хвост морского конька (очень гибкий и сильный, он помогает ему выживать).

На этом фото прекрасно видно строение позвоночника морского конька. Его хвост составляет с туловищем единое целое, как у всех рыб и пресмыкающихся. Но такой гибкий хвост (заворачивающийся в два кольца) только у морского конька! Это и привлекло японских изобретателей!
Аналогично хвосту морского конька робохвост собирается из похожих искусственных позвонков, что позволяет регулировать его вес и длину, оставаясь гибким. Для изменения веса такого хвоста в позвонки вставляются специальные утяжелителями.
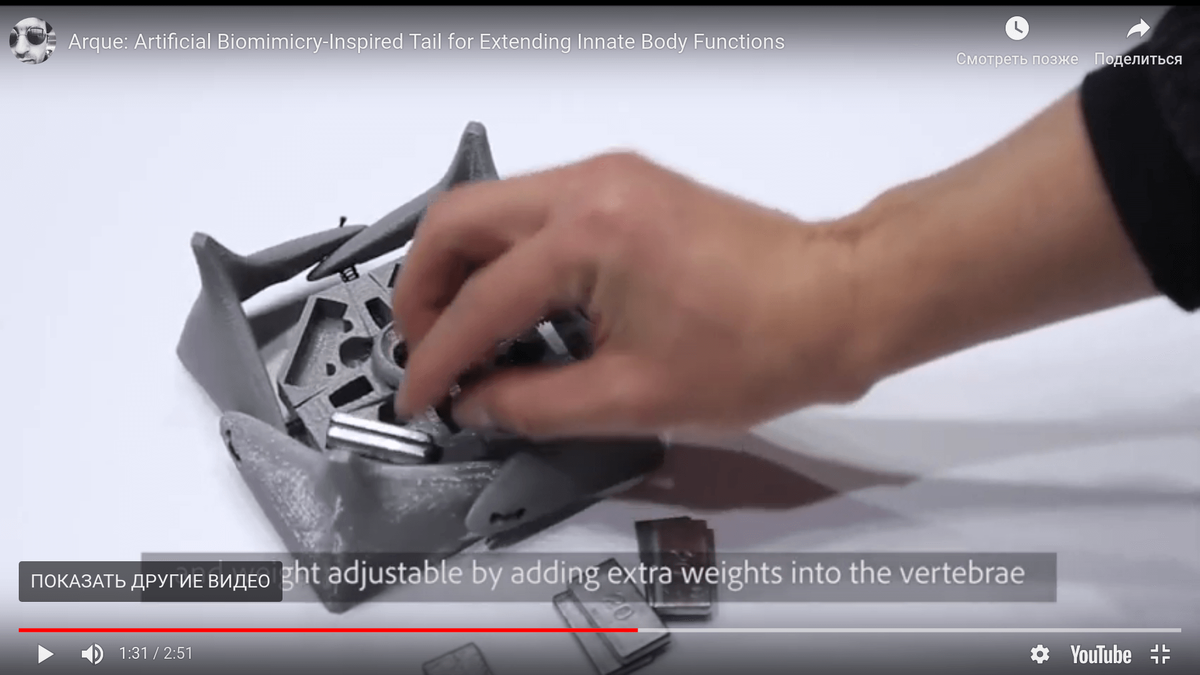
Окончательная конфигурация робохвоста и высота его крепления подбирается индивидуально в зависимости от веса и роста человека, от его пропорций, а также от его физических возможностей и предполагаемых нагрузок.
- А каким образом происходит управление робохвостом?
- Внутри этого хвоста проходят 4 искусственных мускула (их видно на нижнем фото).
На этом фото отчетливо видны две верхние мышцы. Под ними расположены еще две. То есть, имеются две верхние и две нижние мышцы. Они отвечают за подъемом хвоста вверх.
Искусственные мышцы управляются пневматическим устройством. При подаче сжатого воздуха внутрь двух нижних мускул они раздуваются, увеличиваясь в объеме, и поднимают робохвост вверх. А когда этот воздух выпускается и подается в две верхние мышцы, то робохвост опускается.
С другой стороны, эти 4 мускула делятся на два левых и два правых мускула, которые аналогично участвуют в повороте робохвоста влево или вправо.
- И все уже у них слаженно работает, нет никаких недостатков? -
Работает робохвост достаточно хорошо. Управляет всем процессом микроконтроллер. К нему от специальных датчиков поступают сигналы, зависящие от положения тела оператора. Затем, выполнив анализ полученной информации, микроконтроллер подает управляющие сигналы на компрессор. Таким образом изменяется форма изгиба робохвоста и соответственно корректируется положение центра тяжести человека, необходимое для сохранения его равновесия.
В настоящее время есть один "минус":
пневматический двигатель довольно массивный, поэтому испытатель с робохвостом не может далеко отойти от него.
Следующим этапом работы японских инженеров будет разработка портативного компрессорного устройства.
- Ну, допустим, что сделают японцы портативное устройство. Так что, скоро их старики и старушки будут ходить не с палочкой, а с хвостом?! -
Думаю, что на улицах встретить кого-то с робохвостом будет маловероятно, но на территориях реабилитационных центров или на предприятиях, где уже рабочие применяют экзоскелеты, можно будет! Ты думаешь иначе?
- Не знаю, не знаю...
- А вот как выглядит робохвост в действии:
"Нечелочеческий баланс" (видео производства "Sputnicnews.ru")."
Наталия Кушнирская.