Буквально три дня назад вышла статья от Google Research и Google Hardware о представлении трехмерных объектов в виде набора выпуклых оболочек. Это представление обучается через нейронную сеть и дифференцируемо.
Если упростить до двумерного примера, то модель, имея выпуклый объект, может представить его в виде набора полуплоскостей (на картинке понятнее).
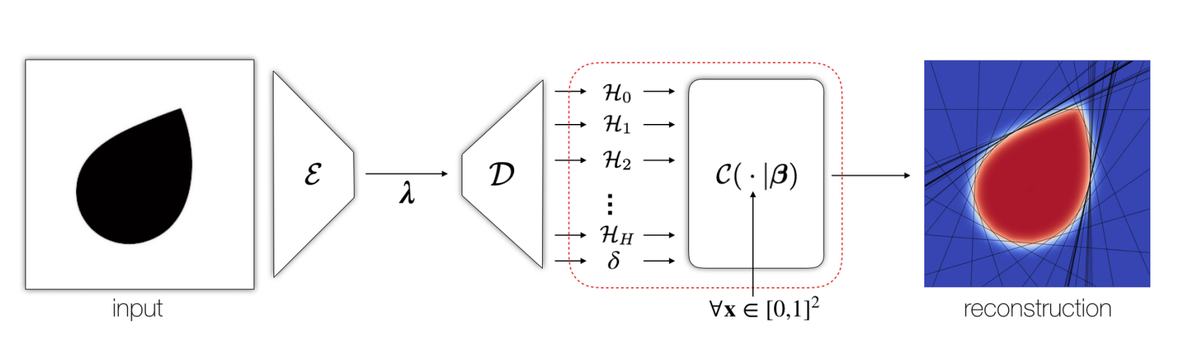
При этом возникает два представления объекта: в виде полигональной сетки (polygon mesh) и в виде индикаторной функции, которая отображает точку в 0, 1 (принадлежит объекту или нет).
Такое представление можно напрямую использовать в физических задачах типа симуляции столкновений. Оно также дает лучшее разбиение объекта на части, чем текущие методы и сравнимо в задаче реконструкции 3D изображение с state-of-the-art, которым является Occupancy Networks.
Разбиение на части также получается из модели напрямую. То есть модель одновременно описывает и поверхность, и 3D структуру, и разбиение на части. Кроме того, скрытое представление, обученное сетью, имеет семантическую нагрузку. Близкие вектора описывают объекты со схожей геометрией, например, похожие конструкции самолетов или шкафчик и колонку в форме параллелепипеда.
В статье очень много интересных картинок.
https://arxiv.org/pdf/1909.05736.pdf
Мой канал в тг: https://t.me/machine_learning_explained