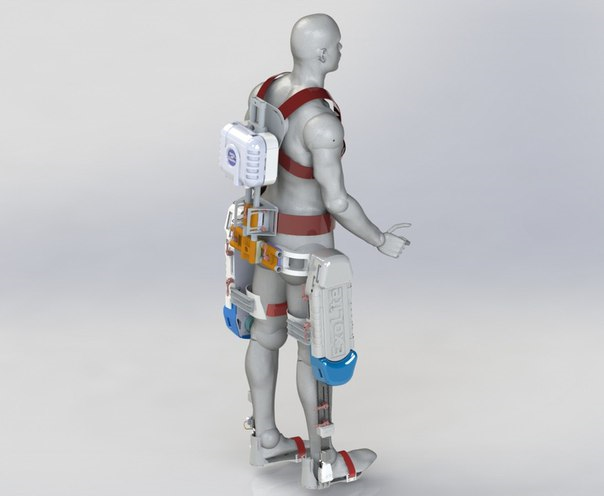
Через бедренные приводы или через бедренные суставы с приводами ноги соединяются со спинной частью. Рис 1.
Важно отметить что для работы всем реабилитационным экзоскелетам нужны костыли. Это требование возникло по 3 причинам:
1. Нужен начальный момент который приводы не могут обеспечить.
2. Уменьшить нагрузку на каркас. Т.к. основной вес идет через руки в костыли.
3. Облегчить управляемость. Т.е. приводам не нужно тратить дополнительную энергию на поддержание пилота в равновесии.
С спинной части экзоскелета чаще всего, если часть не перенесена на бедра, находится электроника и аккумуляторы. Аккумуляторами чаще всего служат батареи из литиевых аккумуляторов разной емкости. Минимальная ёмкость начинается где то с 10 а*ч. Очевидно что чем проще будет электроника и чем меньше будет приводов, тем меньше будет энергопотребление и необходимое количество аккумуляторов.
В зависимости от модели электроника также может очень сильно разница. Но суть это не меняется. Управляются они всегда одинаково и наличие большого количество микроконтроллеров не дает, по сути, ничего, кроме новых потенциальных проблем и повышения цены.
Процессор для просто чередование ног это явный перебор, тем не менее это используется. Рис 2.
В общем минимальная электроника включает в себя:
1.Основной контролер. В нем заложены программы движения и все поведенческие алгоритмы. Тут может быть и обычный микроконтролер avr и полноценный процессор.
2.Литиевый аккумулятор. Внутренний источник энергии.
3.Гироскоп-акселерометр.
4.Бедренный привод с драйвером.(лев.)
5.Коленный привод с драйвером. (лев.)
6. Коленный привод с драйвером. (прав.)
7. Бедренный привод с драйвером.(прав.)
8.Сигнальная шина приводов.
9.Силовая шина приводов.
Именно в таком виде она и использована у нас. В качестве основного контролера используется обычная atmega8 или 16, что не особенно меняет картину.
Как было сказано выше у них почти всегда одинаковое управление - через гироскопы. Называют они их по разному, но суть всегда одна. Управляются они наклоном.
При наклоне вперед включается режим ходьбы и приводы начинают двигать ноги пилота. Важным моментом является то что ни одни из существующих сейчас скелетов не может просто подняться по лестнице. Просто нет возможности сообщить контролеру, разве что установив УЗ радары, что впереди ступеньки.
Для остановки человеку нужно выпрямиться. При этом корреляции со скоростью чаще всего нет.