На данный момент компании занимающиеся экзоскелетными технологиями отработали уже ставшую, можно сказать, стандартной схему реабилитационного экзоскелета. Большинство существующих экзоскелетов построены именно по ней. Есть исключения (Rex), но это единичный случай. Данная стандартизация происходит не с проста. Относительная новизна данной технологии требует поиск оптимальной схемы. Неудивительно что несвязанные между собой коллективы нашли этот оптимум.
Итак.
Все реабилитационные скелеты состоят из легких нижних конечностей, бедренного соединения и спины-корсета с электроникой.
Нижние конечности разных экзоскелетов имеют разное количество сервоприводов, используемых в качестве приводов, но минимальное количество это 4, т.е. по 2 на ногу. Расположены они в коленных и бедренных суставах.
Схему можно увидеть на рис.1
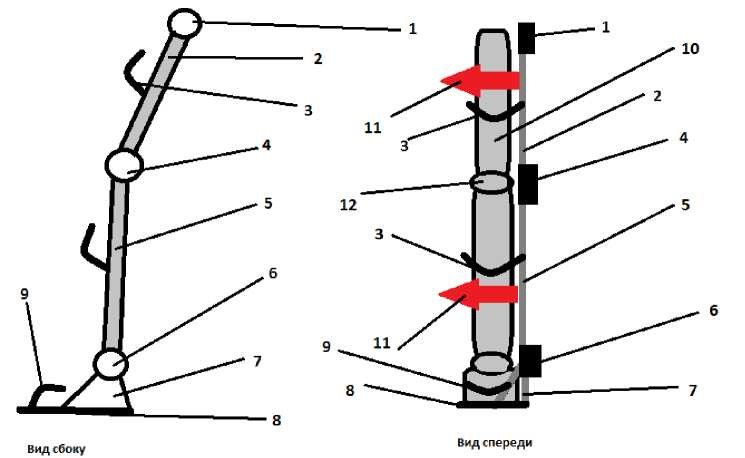
1 - Бедренный сустав, состоящий из удвоенного подшипника и крепления к корпусу.
2 - Бедренная часть корпуса, состоящая из двух металлических (стальных) квадратных труб.
3 - Крепления ноги экзоскелета к ноге пилота.
4 - Коленный сустав, конструкция такая же, как и у бедренного сустава
5 - Основная часть корпуса ноги, конструкция такая же, как и бедренной части.
6 - Сустав ступни, состоящий из удвоенного подшипника и крепления к корпусу ноги с одной стороны и к каркасу укрепленной ступни с другой .
7 - Укрепленный каркас ступни.
8 - Подошва. Обычная резина, для амортизации ходьбы.
9 - Крепления ступни экзоскелета к ступне пилота.
10 - Нога пилота.
11 - Опасные моменты сил, возникающие при нагрузке на каркас. Могут вывести из строя суставы или повредить ногу пилота при большом весе переносимого груза.
12 - Колено пилота
Большее количество приводов не обеспечивает какие то особые преимущества, а скорее наоборот только усложняется синхронизацию и увеличивает энергопотребление. Приводы оснащены червячным или шариковым редуктором. Пример на Рис 2.
Только наличие таких редукторов в сервоприводах обеспечиваю большой момент при очень малых размерах. При этом такие редукторы на порядки проще тех же планетарных, которые также могут обеспечить необходимый момент.
Пример червячного мотор-редуктора - моторы от стеклоподъемников машин.
Каркасы разных моделей довольно сильно различаются, но по сути это просто "костыли" которые крепятся к ноге пилота и двигаются приводами. Закрепляются чаще всего обычными стропами с замками.