Чтобы сделать робот более надежным, исследователи разрабатывают объекты, которыми роботы могут манипулировать настолько сложно, насколько это возможно.
Вдохновленные концепцией противовесов, исследователи UC Berkeley исследуют физические объекты противника, тщательно разработанные, чтобы быть сложными для обычных роботов-захватчиков.В последнее время было проведено множество исследований враждебных образов, которые представляют собой изображения предметов, которые были модифицированы, чтобы было особенно трудно точно идентифицировать с помощью алгоритмов компьютерного зрения. Идея заключается в том, что такого рода изображения могут быть использованы для разработки более надежных алгоритмов компьютерного зрения, поскольку их "враждебный" характер является своего рода преднамеренным наихудшим сценарием - если ваш алгоритм может справиться с враждебными изображениями, то он, вероятно, может справиться с большинством других вещей.Исследователи из лаборатории UC Berkeley's Laboratory for Automation Science and Engineering (AUTOLAB) под руководством профессора Кена Голдберга расширяют эту концепцию до роботизированного захвата, при этом физические объекты противника тщательно разрабатываются с учетом сложности захвата для обычных роботизированных захватов. Все, что требуется, это небольшая настройка на простые трехмерные фигуры, и стандартный двухпальцевый будет иметь всевозможные трудности, чтобы найти твердый захват.Начиная с куба, объект противника становится все более сложным для захвата двумя пальцами - когда он пытается прижать к наклонной поверхности, объект скручивается и соскальзывает.
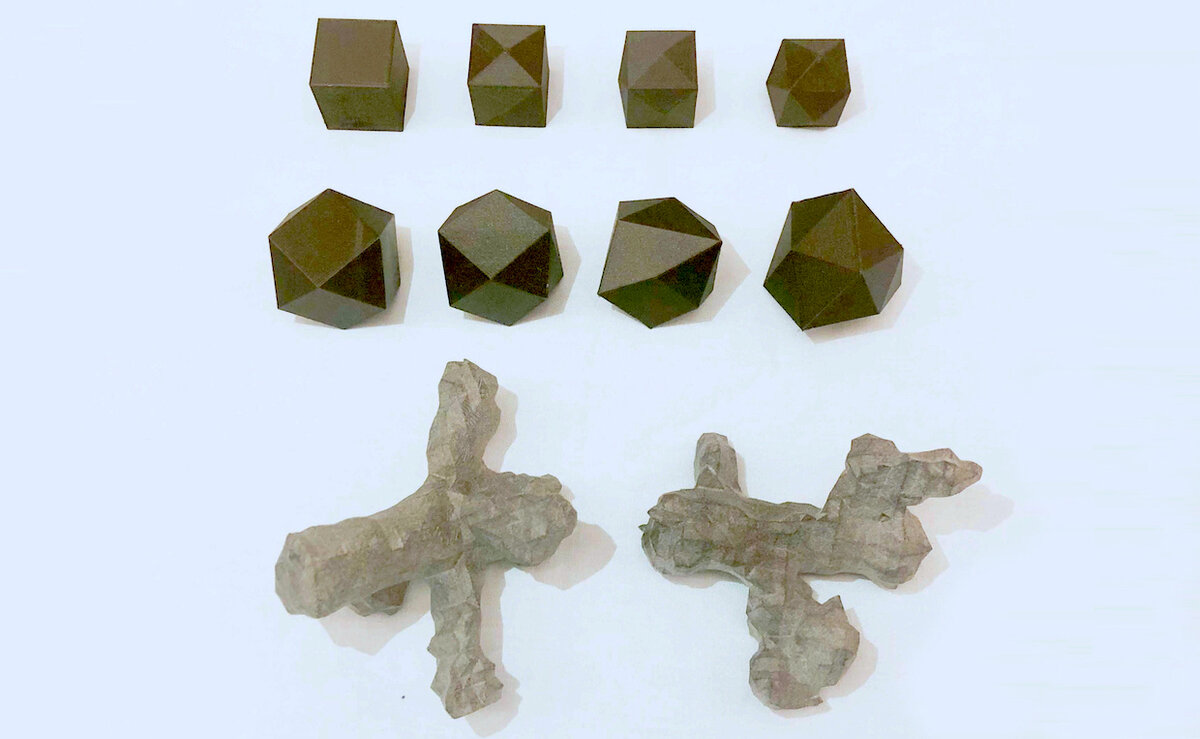
Ключом к этим враждебным объектам является то, что они выглядят легко уловимыми, но, по крайней мере, для захвата двумя пальцами (параллельно челюсти), это не так. Разница между тем, как выглядят объекты и каковы их фактические геометрии, незначительна: в одном из примеров можно увидеть куб с неглубокими пирамидами с трех из шести сторон - наименьшая пирамида имеет наклон всего в 10 градусов. Сторона, противоположная каждой пирамиде, представляет собой ровное, плоское лицо, в результате чего на кубе отсутствуют прямо противоположные стороны. Это создает проблемы для захватов с двумя пальцами, которые работают, зажимая вещи, и если вы пытаетесь прижать их к наклонной поверхности, сила, которую вы прилагаете, может привести к скручиванию предмета, часто приводящему к его неправильному захвату.
Параллельный захват челюстями с пальцами точечного контакта успешно захватывает обычный куб [слева] и не может захватить враждебный куб, разработанный исследователями [справа].Планировщики часто ищут гладкие противоположные поверхности, которые можно "щипать", и поскольку разница между настоящим кубом и враждебным достаточно мала, чтобы его мог не подхватить 3D-датчик, большинство роботизированных систем будут такими: "О, смотри, это просто!" И тогда они, скорее всего, потерпят неудачу, когда куб будет скручиваться и выскальзывать из рук.
Исследователь использует металлические напёрстки для имитации захвата робота.

Противоборствующие формы воздействуют на человека, чересчур носящие наперстки, имитирующие холодную неощутимую сталь робота, и используя два пальца в захвате, исследователи смогли убедиться, что предметы было трудно подобрать.По мере усложнения формы становится все труднее разработать состязательную версию. С помощью кубоэдра (полигона, имеющего восемь треугольных граней и шесть квадратных граней) исследователи произвольно возмущали вершины формы (в моделировании) до тех пор, пока они не получили такую, которая не имела прямо противоположных поверхностей. Для еще более сложных форм, таких как пересекающиеся цилиндры, с помощью алгоритма глубокого изучения были получены враждебные примеры.
Суть всего этого не только в том, чтобы расстроить ваш слабый алгоритм восприятия - это в том, чтобы разработать инструменты, которые помогут сделать понимание робота достаточно надежным, чтобы (будем надеяться) надежно работать в реальном мире.Противоборствующие объекты для роботов
Для сложных форм, таких как пересекающиеся цилиндры, исследователи использовали алгоритмы глубокого изучения для создания состязательных конструкций. В некоторых предварительных реальных испытаниях параллельный захват губками с точечным контактом пальцев пытался захватить некоторые из этих враждебных объектов. В каждом случае предполагалось, что расчетное понимание (на основе политики Dex-Net, основанной на моделируемом объекте) будет успешным в течение 100% времени, однако фактические показатели успеха на состязательных кубах и кубоэдрах составляли всего 13%.Исследователи говорят, что они планируют протестировать эти объекты с помощью различных захватов, а также присосок, чтобы убедиться, что они могут придумать наиболее враждебные объекты. И помните, что суть всего этого не только в том, чтобы разочаровать ваш слабый алгоритм восприятия - это в том, чтобы разработать инструменты, которые помогут сделать робот достаточно надежным для (будем надеяться) надежной работы в реальном мире.