Для устойчивого управления кордовой моделью необходимо, чтобы корды были всегда натянуты. Для этой цели создают небольшой, фактически незаметный, крен модели на правую плоскость крыла, чтобы модель пыталась, как бы «вылететь» из круга. Это достигается созданием несимметричности результирующих подъемных сил левой и правой сторон модели.
На не пилотажных моделях для этого руль высоты располагают лишь на правой консоли стабилизатора. В результате на этой консоли создается отрицательная подъемная сила, которая и создает требуемую несимметричность.
Для создания на пилотажных моделях требуемой несимметричности подъемных сил используют два приема. Первый - левую консоль крыла выполняют по размаху больше правой, и второй - левый закрылок выполняют по размаху больше правого. На практике оба этих приема используют, как вместе, так и по отдельности. Недостаток таких способов создания несимметричности подъемных сил правой и левой стороны модели заключается в том, что при выполнении квадратных и треугольных элементов фигур пилотажа консоли крыла создают весьма большие подъемные силы (перегрузка достигает 15 и более единиц) и, следовательно, создается весьма большая разница этих подъемных сил. Это обстоятельство приводит к тому, что модель испытывает на углах фигур нежелательные отклонения по крену, нарушающие чистоту выполнения фигуры.
Технической задачей, решаемой изобретением, является устранение указанного недостатка. Поставленная задача решается за счет того, что в кордовой пилотажной модели самолета, включающей фюзеляж, шасси, винтомоторную установку, несущую, стабилизирующие и управляющие аэродинамические поверхности, в том числе левый и правый рули высоты, шарнирно связанные со стабилизатором, связь между правым и левым рулями высоты выполнена таким образом, что при малых отклонениях правого руля высоты модель управляется только им, а при больших отклонениях модель управляется обоими рулями.
При таком выполнении кордовой пилотажной модели самолета модель не испытывает на углах пилотажных фигур нежелательные отклонения по крену, нарушающие чистоту выполнения фигуры.
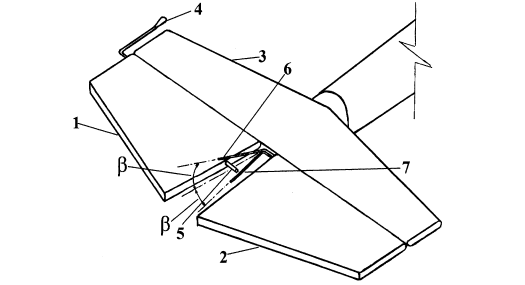
Левый руль 1 высоты и правый руль 2 высоты шарнирно связаны со стабилизатором 3, но между собой жесткой связи не имеют. Элементы 1, 2 и 3 в совокупности представляют горизонтальное оперение (ГО) модели. Правый руль 2 высоты непосредственно кинематически связан с системой управления модели, а левый руль 1 такой непосредственной связи не имеет. На левом конце левого руля 1 высоты жестко укреплен балансир 4, благодаря которому левый руль 1 уравновешен и находится в горизонтальном положении. На правом конце левого руля 1 жестко укреплен шип 5, ориентированный перпендикулярно плоскости симметрии модели. На левом конце правого руля 2 высоты жестко укреплены верхний поводок 6 и нижний поводок 7, выполненные в виде стержней, например, из проволоки. Поводок 6 наклонен относительно плоскости правого руля 2 высоты на угол β вверх, а поводок 7 - на тот же угол β вниз. Комбинация поводков 6 и 7 имеет форму буквы V, положенную на левый бок, при этом острие буквы направлено вперед по направлению полета модели.
Устройство работает следующим образом. В общем случае для обеспечения горизонтального полета модели достаточно малого отклонения вверх рулей высоты. На данной модели такое отклонение обеспечивается только лишь правым рулем 2 высоты, который непосредственно кинематически связан с системой управления модели. При этом левый руль 1 высоты является «плавающим» и занимает положение вдоль встречного потока. Вследствие этого на левой стороне ГО не возникает никакой аэродинамической силы. Таким образом, левый руль 1 высоты при горизонтальном полете модели не оказывает никакого аэродинамического влияния на управление моделью. На правой стороне ГО вследствие небольшого отклонения правого руля 2 высоты вверх возникает небольшая отрицательная подъемная сила (направленная вниз), которая и создает требуемую для кордовых моделей разницу подъемных сил левой и правой стороны модели. При выполнении фигур пилотажа необходимо отклонять рули высоты до значений в 35-45 градусов. Как только отклонение правого руля 2 высоты достигнет значения β, например, вверх, нижний поводок 7 приходит в соприкосновение с шипом 5 и дальнейшее отклонение вверх правого руля 2 высоты вызывает отклонение вверх левого руля 1 высоты вследствие давления нижнего поводка 7 на шип 5. Совершенно аналогичные процессы происходят при отклонении правого руля 2 высоты вниз с той лишь разницей, что на шип 5 давит уже верхний поводок 6. Таким образом, величина отклонения левого руля 1 высоты отстает от величины отклонения правого руля 2 высоты на угол β, чем обеспечивается разность подъемных сил левой и правой стороны модели, и эта разница практически постоянна и не зависит от величины подъемных сил консолей крыла модели при условии, что эти консоли идентичны. В результате даже при очень больших перегрузках, возникающих при резких эволюциях, модель не испытывает паразитных отклонений по крену.
Более подробная информация на сайте https://sites.google.com/site/1fanplan/home