Автономная навигация астробота поможет высаживающимся на Луну, роботам и беспилотникам найти свой путь на Луну.
Нил Армстронг сделал так, чтобы это звучало легко. "Хьюстон, база спокойствия здесь. Орёл приземлился", - спокойно сказал он, словно только что приземлился на стоянку. На самом деле, спуск шлюпки "Аполлон-11" был нервным срывом. Когда орел поднялся на Луну, Армстронг и его коллега Базз Олдрин поняли, что он приземлится намного дальше запланированной посадочной площадки и направится прямо к полю валунов. Армстронг начал искать лучшее место для парковки. Наконец, на высоте 150 метров он выровнялся и направился в гладкое место, где оставалось около 45 секунд топлива.
"Если бы его там не было, кто знает, что бы случилось?"
- говорит Эндрю Хорхлер, поднимая руки вверх.
Он сидит в конференц-зале со стеклянной стеной в переоборудованном кирпичном складе, входящем в состав Питтсбургского роботизированного ряда - центра технологических стартапов. Это штаб-квартира компании космической робототехники "Астроботические технологии". В ближайшие десятилетия набеги человека на Луну будут в значительной степени зависеть от роботов-земледельцев, скакунов и беспилотников. Горхлер возглавляет команду, целью которой является обеспечение того, чтобы эти роботизированные корабли, включая собственный шлюпка Peregrine компании Astrobotic, могли работать, по крайней мере, так же хорошо, как Armstrong.
Технология точной навигации компании Astrobotic позволит как экипажу, так и экипажу приземлиться в нужном месте, так что будущему Armstrong не нужно будет усиливать управление своим десантным кораблем. Как только они окажутся на поверхности Земли в безопасности, такие роботы, как "Астроботы", изучат геологию Луны, найдут места для будущих лунных баз и привезут оборудование и материалы, предназначенные для этих баз, говорит Горхлер. В конце концов, роверы помогут добывать минералы и воду, замороженные глубоко в кратерах и на столбах.
Компания Astrobotic была основана в 2007 году робототехниками в Университете Карнеги-Меллон для борьбы за приз Google Lunar X Prize, который призывал команды поставить на Луну роботы-космический аппарат. В 2016 году компания вышла из конкуренции, но ее миссия продолжала развиваться. В настоящее время в компании работает 20 человек, и она заключила контракты с десятком организаций на поставку полезной нагрузки на Луну по цене 1,2 млн. долл. за килограмм, что, по словам компании, является самым низким показателем в отрасли. В конце прошлого года компания Astrobotic вошла в число девяти компаний, которые НАСА выбрала для доставки на Луну полезной нагрузки в рамках своей 10-летней программы коммерческой полезной нагрузки (CLPS) стоимостью 2,6 млрд. долл. В конце мая космическое агентство объявило о первом раунде контрактов CLPS, в рамках которого компания "Астроботик" получила 79,5 млн. долл. США для доставки своей полезной нагрузки к июлю 2021 года.
Между тем, Китай, Индия и Израиль запустили или планируют запустить беспилотные лунные аппараты или сделать это в ближайшее время. К 60-летию Аполлона 11, в 2029 году, Луна, вероятно, будет намного более оживленным местом.
Привлекательность Луны универсальна, говорит Джон Хорак, инженер-аэрокосмонавт из Университета штата Огайо. "Луна просто висит в небе, манит нас. Что не знает языковых и культурных барьеров. Неудивительно, что многие задумываются о том, как добраться до Луны."
На Луне нет GPS, магнитного поля, обеспечивающего получение компенсации, или карт высокого разрешения для лунного корабля, которые можно было бы использовать для определения местоположения и направления полета. Любое судно также будет ограничено в вычислениях, мощности и датчиках, которые оно может нести. Навигация по Луне больше похожа на поиск путей древних полинезийцев, которые изучали звезды и океанические течения, чтобы отслеживать траекторию, местоположение и направление своих лодок.
Поисковые приборы космического аппарата представляют собой инерциальные единицы измерения, в которых гироскопы и акселерометры используются для расчета положения, скорости и направления от фиксированной начальной точки. Эти системы экстраполируются на основе предыдущих оценок, поэтому ошибки накапливаются с течением времени.
"По мере продвижения вперёд ваше знание того, где вы находитесь, становится всё более пушистым и пушистым,
- говорит Горхлер.
"Наша система разрушает эту пушистость до известной степени."
Обычная система наведения может опустить судно в пределах эллипса длиной в несколько километров, но система астробота посадит судно в радиусе 100 метров от цели. Это может позволить тачдауны вблизи миниатюрных кратеров, на сильно затененных ледяных столбах или на площадке посадки рядом с лунной базой.
"Одно дело приземлиться один раз на площадку, совсем другое - многократно с точностью приземлиться",
- говорит Горхлер.
Датчик навигации по местности (TRN) компании Astrobotic содержит все необходимое оборудование и программное обеспечение для интеллектуальной навигации. Он использует 32-битные процессоры, которые хорошо зарекомендовали себя в других миссиях, и аппаратное ускорение FPGA для низкоуровневой обработки компьютерного зрения. Процессоры и FPGA имеют радиационную закалку. Блок размером с кирпич может быть прикреплен болтами к любому космическому кораблю. Сенсор будет делать изображение лунной поверхности в несколько мегапикселей каждую секунду.
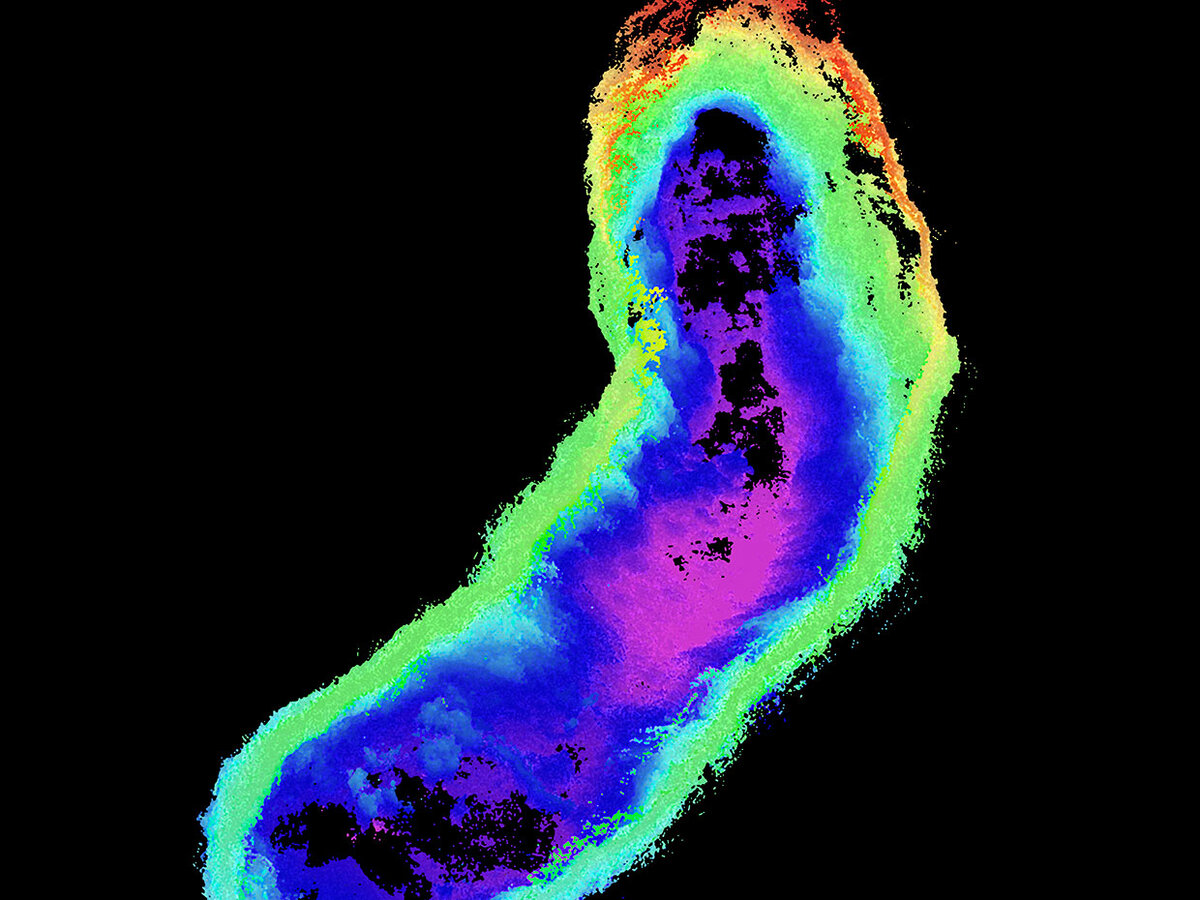
ти сохраненные карты - чудо вычислительной техники. Снимки, сделанные спутником НАСА LRO (Lunar Reconnaissance Orbiter), который картографирует Луну с 2009 года, имеют очень разные перспективы и тени от того, что будет видеть спускающийся спутник. Особенно это касается полюсов, где угол наклона солнца кардинально меняет освещение.
Сравнение синтетического изображения Астроботика и снимка, полученного с помощью лунного орбитального аппарата НАСА "Лунная разведка".

Правда, в чем жизнь: Синтетический образ астробота вокруг кратера Шеклтона (снизу) практически неотличим от снимка, сделанного орбитальным аппаратом НАСА "Лунная разведка" (сверху).
Поэтому мастера-программисты Astrobotic создают синтетические карты. Их программное обеспечение начинается с моделей рельефа, основанных на данных LRO. Он объединяет эти модели рельефа с данными об относительном положении Солнца, Луны и Земли; приблизительном местоположении зонда; и текстуре и отражательной способности лунной почвы. Наконец, система трассировки лучей на основе физики, подобная той, которая используется в анимационных фильмах для создания синтетических изображений, объединяет все воедино.
Горчлер делает два снимка участка 50 на 200 километров вблизи южного полюса Луны. Один из них - фотография, сделанная LRO. Другая - это версия с цифровой визуализацией, созданная программным обеспечением Astrobotic. Я не могу отличить их друг от друга. По словам Горхлера, будущие системы TRN смогут создавать карты высокой точности на ходу спуска спускаемого спуска, но это невозможно с учетом мощности бортовых вычислительных систем, работающих на токе.
Чтобы подтвердить алгоритмы TRN, Астроботик провел испытания в пустыне Мохаве. На видео 2014 года показан датчик TRN, установленный на вертикальном аппарате Masten Space Systems, другой компании, выбранной для программы НАСА CLPS. Инженеры-астроботы заранее нанесли на карту пологий участок, в том числе потенциальную площадку посадки, заваленную мешками с песком, имитирующими крупные породы. На видеозаписи видно, как автомобиль взлетает без запрограммированного пункта назначения. Навигационный датчик сканирует почву, сопоставляя видимое с сохраненными картами. Датчик обнаружения опасности использует лидарные и стереокамеры для отображения форм и высоты рельефа скалистой местности и отслеживания расстояния до земли. Ремесло приземляется безопасно, избегая мешков с песком.
Компания "Астроботик" ожидает, что ее первая миссия CLPS будет запущена в июле 2021 года на борту ракеты "Атлас V" Объединенного пускового альянса. На борту космического аппарата "Перегрин" будут установлены 28 полезных нагрузок, в том числе научные приборы НАСА, другая научная аппаратура Мексиканского космического агентства, стартапы в Чили и Японии, а также личные подарки от платных клиентов.
В пространстве, которое сотрудники астробота называют "Тигриное логово", большой плюшевый тигр следит за инженером Джереми Харди, который, похоже, слишком веселится. Он управляет виртуальным беспилотником на экране сквозь пейзаж деревьев и скал. Когда он переключается на вид с беспилотника на глаза, пейзаж заполняется зелеными точками, каждая из которых является уникальной, как угол или край.
Программа, которую использует Харди, называется AstroNav, которая будет направлять двигательные дроны, пролетающие через огромные лавовые трубки Луны. Считается, что эти термостабильные туннели имеют десятки километров в длину и "могут вместить в себя целые города", - говорит Горхлер. Беспилотники будут картировать туннели во время полета, возвращаясь обратно для подзарядки и посылая изображения на лунную станцию или на Землю.
Беспилотник Харди летит по неизведанной территории. AstroNav использует алгоритм одновременной локализации и картографирования (SLAM) - сверхтяжеловесную технологию, которая также используется для самостоятельного вождения автомобилей и офисных роботов доставки для построения карты своего окружения и расчета своего местоположения внутри этой карты. AstroNav объединяет данные инерциальных единиц измерения беспилотника, стерео-видеокамер и лидара. Программное обеспечение отслеживает зеленые точки на многих кадрах для вычисления местоположения беспилотника.
Компания провела испытания шестиугольников под руководством AstroNav в пещерах Западной Вирджинии, кратерах в Нью-Мексико и лавовой трубке Lofthellir в Исландии. Аналогичные методы SLAM могут направлять автономные лунные роверы, поскольку они исследуют постоянно затененные области на полюсах.
У астробота много соперников. Еще одним подрядчиком КППС является лаборатория "Дрейпер", которая помогала направлять миссии "Аполлона". Навигационная система лаборатории, также построенная на обработке и распознавании изображений, доставит японский стартап Ispace на Луну.
Специальный соус" от Draper's - это программное обеспечение, разработанное для Объединенной системы точного сброса аэрозоля армии США, которая обеспечивает поставки через парашют в зонах боевых действий, говорит руководитель программы космических систем Алан Кэмпбелл. В коробке, называемой воздушным блоком управления, находится камера, направленная вниз, двигатели и небольшой компьютер с программным обеспечением Draper. Программное обеспечение определяет местоположение парашюта путем сравнения характеристик местности на снимках камеры и коммерческих спутников для посадки на парашют в пределах 50 метров от цели.
В устройстве также используется доплеровский лидар, который обнаруживает опасности и измеряет относительную скорость.
"Когда вы выше, вы можете сравнивать снимки с картами",
- говорит Кэмпбелл.
На меньших высотах используются различные методы треков и способы их перемещения. "Лидар даст вам более тонкую зернистую карту опасностей."
Многолетний опыт работы Дрейпера с Аполлоном дает лаборатории преимущество, добавляет Кэмпбелл. "Мы уже приземлялись на Луну раньше, и я не думаю, что наши конкуренты могут так говорить."
Другие страны с лунными устремлениями также полагаются на автономное судоходство. Например, китайский корабль Chang'e 4 стал первым кораблем, приземлившимся на дальнюю сторону Луны в начале января. На своем десантном видео корабль парит на несколько секунд над поверхностью земли. "Это означает, что у него есть лидар или камера [a] и он делает снимок поля, чтобы убедиться, что он приземлился в безопасном месте", - говорит Кэмпбелл. "Это определенно автономная система."
Ожидается, что израильский лунный космический корабль "Берешит" также совершит полностью автоматизированный тачдаун в апреле. Согласно отчетам, он полагался на программное обеспечение для обработки изображений, установленное на компьютере, примерно таком же мощном, как и смартфон. Однако буквально за несколько минут до приземления он упал на поверхность Луны из-за очевидной поломки двигателя.
В гонке на Луну победителя не будет, говорит Хорак из штата Огайо. "Нам нужно достаточное количество успешных организаций со всего мира, работающих над этим."
Астроботик также смотрит дальше. Его AstroNav можно было бы использовать на других космических телах, для которых нет карт высокого разрешения, таких как Луны Юпитера и Сатурна. Задача будет заключаться в уменьшении аппетита программного обеспечения к вычислительным мощностям. Вычисления в космосе значительно отстают от вычислений на Земле, отмечает Горхлер. Все должно быть устойчивым к излучению и разработанным для использования в сложных условиях. "Как правило, это очень обычайно", - говорит он. "У вас не будет нового семейства процессоров каждые два года. Яблочные часы обладают большей вычислительной мощностью, чем многие другие космические корабли."
Луна станет важнейшим испытательным полигоном для точной посадки и навигации. "Многое из того, что требуется для приземления на Луну, похоже на то, что требуется для приземления на Марс или на такие иконные луны, как Европа, - говорит Горхлер. "Гораздо проще доказать это на ближайшем соседе, чем на телах на полпути через Солнечную систему."