Термин "робот" нелегко определить, но его этимология достаточно проста. Это не очень старое слово, которое было внедрено в английский язык довольно недавно. Оно появилось к началу ХХ века, когда польский драматург Карел Чапек представил уникальный и несколько пророческий взгляд на будущее со своей новаторской пьесой “Универсальные Роботы Россума"."Чапек выбрал слово" робот “исходя из своего старославянского происхождения,” работа “ – что в основном переводится как "рабство".”
Прежде чем стать известным писателем-фантастом, Карел Чапек работал журналистом. И хотя "Универсальные Роботы Россума" были произведением спекулятивной фантастики, они служат подходящей прелюдией к реальности нашей все более автоматизированной технической культуры. Как и более поздняя серия фильмов "Терминатор", R. U. R. изображает роботов как будущих повелителей, которые идут на войну с людьми. В пьесе подчеркивается, что роботы были созданы, чтобы служить людям, но постепенно перенимают многие их характеристики и в конечном итоге пытаются их обогнать. В степени имитации человеческого сходства и способности (подмножество биороботики, которая является областью, в которой жизнь имитируется с помощью технологии) эта история в значительной степени отражает то, как роботы будут развиваться в течение следующего столетия.
В ходе промышленной революции у технологии сложились довольно непростые отношения с трудом. Термин "Луддит" часто используется для обозначения кого-то, кто не доверяет или выступает против технологии, и происходит от слова для английских Текстильщиков, которые восстали против промышленных инноваций. Это было раннее признание потенциала технологии, чтобы нарушить, и, возможно, в конечном итоге перевернуть человеческую рабочую силу.
Но человеческое общество процветает, и автоматизация реализуется там, где человеческий труд становится слишком дорогостоящим и неэффективным, чтобы оправдать его. Технология была благородным слугой людей во многих отношениях на протяжении многих лет. И хотя она вдохновлена природой, она в конечном счете стремится улучшить ее. Таким образом, роботы, которые мы создали по нашему подобию, превзойдут многие из наших собственных человеческих ограничений (как многие уже есть). По мере развития этой эволюции идея робота, вероятно, станет довольно абстрактной, что ставит вопрос о том, что в настоящее время определяет роботов как физических существ. Следующие пять основных качеств характеризуют роботов, которых мы знаем сегодня.
Умственные способности
Человеческий интеллект является производной от сложной и взаимосвязанной сети нейронов в человеческом мозге. Эти нейроны образуют электрические соединения друг с другом, но остается неясным, как именно они призваны развивать активность мозга, какие мысли и рассуждения. Тем не менее, инновации в области вычислений и интеллектуального анализа данных позволяют создавать искусственно интеллектуальные системы, отражающие интеллектуальные возможности человека.
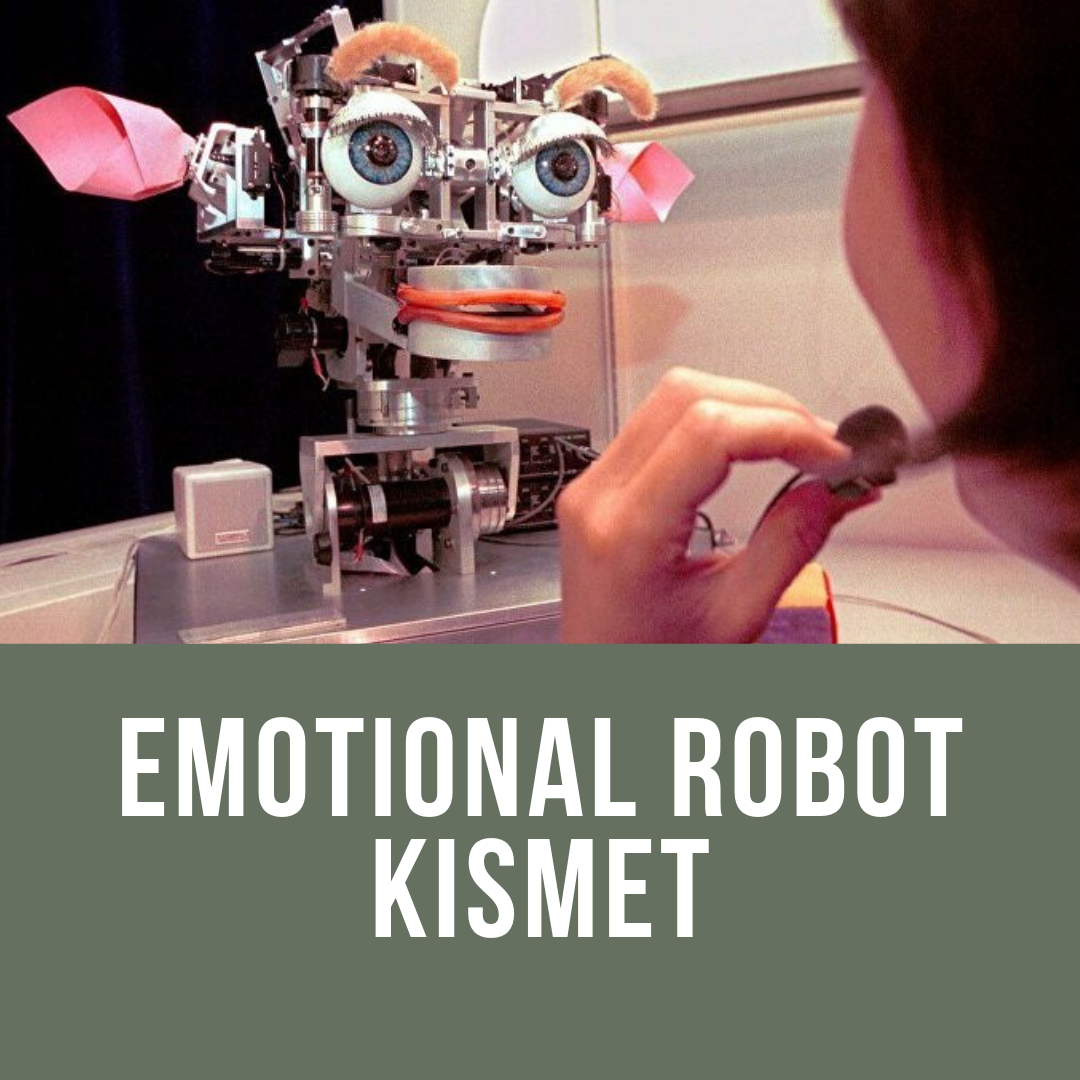
Робот, известный как Kismet (разработанный в Массачусетском технологическом институте), децентрализует свои вычисления, разделяя их на разные уровни обработки. Более высокие уровни вычислений имеют дело со сложными и технически продвинутыми процессами, в то время как более низкие ресурсы выделяются на утомительную и повторяющуюся деятельность. Кисмет работает очень похоже на нервную систему человека, которая состоит из произвольной и непроизвольной функциональности. Искусственный интеллект - это очень спорная технология, включая то, как применяется его терминология, а также субъективную природу ИИ и может ли он когда-либо представлять собой форму сознания.
Чувство
Технология, которая дает роботу чувство способствует нашей способности общаться в электронном виде в течение многих лет. Электронные коммуникационные механизмы, такие как микрофоны и камеры, помогают передавать сенсорные данные на компьютеры внутри моделируемых нервных систем. Смысл полезен, если не фундаментален для взаимодействия роботов с живой, естественной средой.
Человеческая сенсорная система распадается на зрение, слух, осязание, обоняние и вкус – все это каким-то образом было или внедряется в робототехнику. Зрение и слух моделируются путем передачи носителей в базы данных, которые сравнивают информацию с существующими определениями и спецификациями. Когда звук слышен роботом, например, звук передается в базу данных (или” лексикон"), где он сравнивается среди аналогичных звуковых волн.
Ловкость
Ловкость относится к функциональности конечностей, придатков и конечностей, а также к общему диапазону двигательных навыков и физических возможностей тела. В робототехнике ловкость максимизируется там, где существует баланс между сложным оборудованием и высокоуровневым программированием, которое включает в себя возможности экологического зондирования. Многие различные организации достигают значительных успехов в роботизированной ловкости и физической интерактивности.
Министерство обороны Соединенных Штатов является принимающей стороной Агентства перспективных исследовательских проектов обороны (DARPA), которое спонсирует большое количество инноваций в разработке протезов конечностей. Эта технология дает большое представление о будущем ловкости роботов, но не все роботы имитируют человеческую физическую форму (те, которые часто называют “андроидами”, чье греческое этимологическое происхождение в основном переводится как “сходство с человеком”). Такие организации, как Boston Dynamics, исследуют множество как двуногих, так и четвероногих конфигураций (с его знаменитым роботом BigDog, попадающим в последнюю категорию), расширяя идею внешней ловкости в механизмах захвата.
Сила
Роботы требуют источника энергии, и есть много факторов, которые входят в решение, какая форма власти обеспечивает наибольшую свободу и возможности для роботизированного тела. Существует много различных способов генерирования, передачи и хранения энергии. Генераторы, батареи и топливные элементы дают энергию, которая хранится локально, но также временно, в то время как привязка к источнику питания естественно ограничивает свободу устройства и диапазон функций.
Одним очень заметным исключением была бы простая механическая двуногая система ходьбы, которая полагается только на гравитацию, чтобы продвигать свой цикл ходьбы (разработанный в Японском технологическом институте Нагои). Хотя это не может квалифицироваться как автономный (без каламбура) робот, это может привести к инновациям о том, как мощность робота может быть потенциально оптимизирована или, возможно, даже сгенерирована.
Независимость
Интеллект, чувство, ловкость и сила все сходятся, чтобы обеспечить независимость, которая, в свою очередь, теоретически может привести к почти персонифицированной индивидуализации роботизированных тел. От своего происхождения в рамках работы спекулятивной фантастики слово "робот" почти повсеместно относится к искусственно интеллектуальным машинам с определенной степенью человечности к его дизайну и концепции (как бы далеки они ни были). Это автоматически наполняет роботов чувством индивидуальности. Это также поднимает много потенциальных вопросов относительно того, может ли машина когда-либо действительно “пробудиться” и стать сознательной, и, следовательно, рассматриваться как индивидуальный субъект (или человек).