Человек может осязать, взвешивать и захватывать руками различные объекты, одновременно определяя их материальные свойства и прилагая при этом нужное количество усилий, что является сложной задачей для современного робота. Несмотря на то, что технология захвата объектов с помощью роботов на основе компьютерного зрения значительно продвинулись вперед за счет применения визуальных данных и новых инструментов машинного обучения, до сих пор не существует эквивалентных сенсорных платформ и крупномасштабных наборов данных, позволяющих эффективно использовать тактильную информацию, на которую полагается человек при захвате объектов.
Ученые из Массачусетского технологического института (США) разработали сенсорную перчатку, которая может идентифицировать объекты с помощью осязания. Это устройство может улучшить функциональность и производительность роботов и расширить возможности протезов рук.
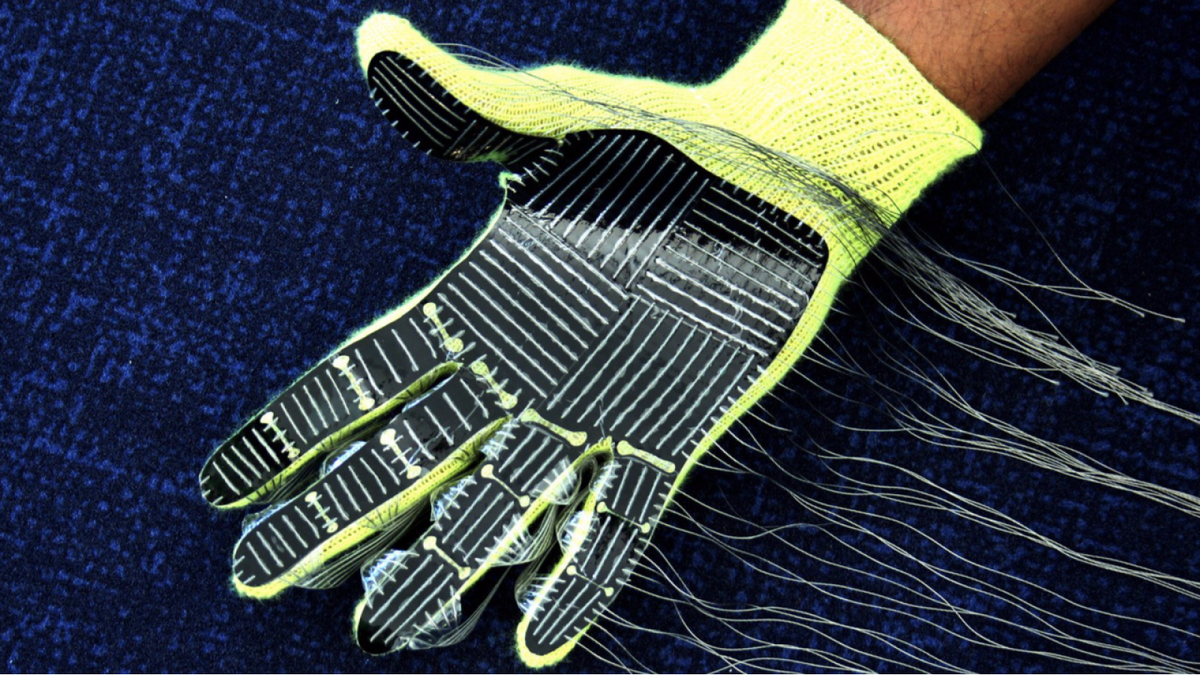
Недорогая "тактильная перчатка" содержит 550 миниатюрных датчиков давления, равномерно распределенных по руке. Данные, полученные при помощи этих сенсоров, обрабатываются программным обеспечением на базе нейронной сети, после чего система способна классифицировать объекты и предсказать их вес. При этом не требуется использовать какие-либо визуальные данные.
Информация об этой разработке была опубликована в журнале Nature.
В экспериментах, которые описаны в статье, система показала свою способность точно обнаруживать объекты, включая банку с газировкой, ножницы, теннисный мяч, ложку, ручку и кружку в 76% случаев.
Тактильные сенсоры могут использоваться в сочетании с традиционной системой компьютерного зрения и наборами данных, основанными на изображениях, чтобы дать роботам более человеческое понимание принципов взаимодействия с объектами. Кроме этого, для улучшения конструкции и функционирования протезов, можно использовать набор данных, который основан на измерениях взаимодействий отдельных областей кисти.
Существующие аналогичные перчатки на основе сенсорной технологии стоят сегодня несколько тысяч долларов и обычно снабжены 50 датчиками. Производство перчаток, разработанных в МТИ, обойдется примерно в 10 долларов США.