Здравствуйте, в данной статье хочу подробно рассказать Вам, как сделал свой 3D сканер.
- Предыдущий проект:
Корпус сканера в основном будет сделан из вырезанной МДФ панели, который состоит из двух частей соединяющихся переходными трубками, часть деталей взял из предыдущего проекта по изготовлению поворотного стола.
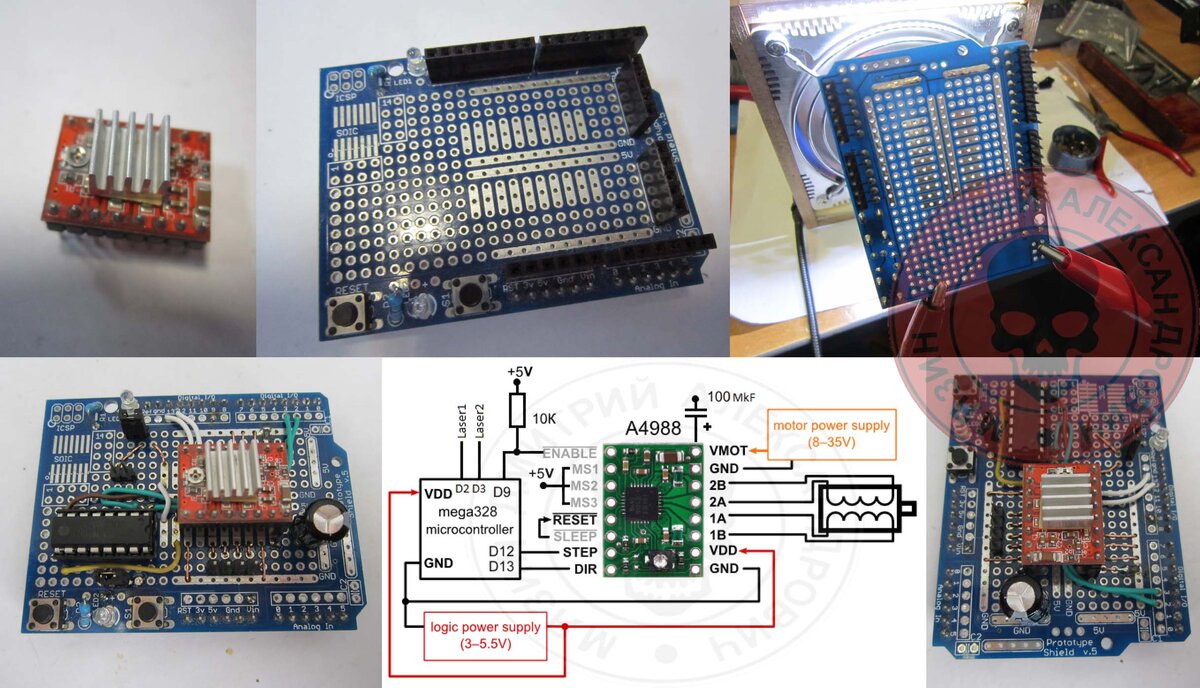
Основным контроллером будет использоваться Arduino Uno, для которого сделал шилд с драйвером А4988, который будет управлять шаговым двигателем NEMA17, а также на шилде дополнительно расположил пины подключения двух лазеров.
Корпус сканера начал делать с поворотного стола, детали корпуса соединял с помощью мелких саморезов или клея. В корпусе так же сделал отверстия для вентилятора охлаждения двигателя и переходных соединительных трубок. В промежутке между столом и основанием установил большой подшипник с поворотной частью, которая осталась от предыдущего пробного проекта.

Сам поворотный диск состоит из четырех частей, склеенные между собой под разными углами. Во внутрь основания установил двигатель NEMA17 на вал, которого будет фиксироваться диск.
Установил переходные трубки в вырезанные отверстия корпуса, также в одной из трубок сделал отверстие для проводов управления двигателем. Трубки установил вплотную к двигателю для отвода тепла от него.
Проверяю чтобы не было перекосов при повороте диска.
Начинаю делать вторую часть, назвал его блоком управления, в нем сделал отверстия для входных трубок от стола и установил скобы крепления для веб камеры.
Подгоняю входные трубки от стола в корпус блока.
Начинаю устанавливать из шпилек боковые направляющие для крепления лазеров.
Через трубку в которой сделал дополнительные отверстия проложил провод, с одной стороны припаиваю его к двигателю, а с другой вывожу для дальнейшего подключения к шилду с контроллером Arduino Uno.
Вот что получается.
Креплю пластиковые крепления для лазеров на направляющие и устанавливаю в них лазеры на 5мВт.
Вывел провода от лазеров к месту установки контроллера.
Устанавливаю шилд с контроллером Arduino Uno и подключаю к нему все приходящие провода.
Сделал небольшой переходник для вывода USB из Arduino на корпус блока управления.
Делаю балансировку чтобы убрать все неровности поворотного диска на станке.
Нашёл ленту от самоклеющейся липучки, которую приклеиваю в отверстие для установки веб камеры.
Установил и подключил вентилятор.
Изготовляю из ПВХ пластика калибровочную доску и приклеиваю на неё шаблон для калибровки.
Проверяю как устанавливается камера в отверстие сканера.
Покрываю лаком торцы и приклеиваю наждачную бумагу на поворотный диск.
Когда подключал камеру выяснилось, что она установлена слишком низко и придется приподнимать весть блок управления, для этого вырезал дополнительные детали.
Собираю из деталей дополнительное основание и приподнимаю блок на несколько сантиметров.
При установке трубок немного повредил входные отверстия, вырезал небольшие декоративные детали из пластика.
Так же решил переделать боковые направляющие, что бы не было видно шпилек, дополнил их дополнительными деталями, в которые вставил разъемы подключения для лазеров и светодиоды для индикации включения лазера с обратной стороны.
После покраски деталей пробую сканировать кружку.
Решил переделать пластиковые крепления для лазеров, так как они не вписывались в конструкцию, для этого вырезал новое крепление.
Вот что получилось.
Делаю калибровку в программе Horus.
Теперь попробую сканировать бутылочку.
Результатом остался доволен. Ссылку на архив с отсканированной 3D моделью положил в конце статьи.
Прежде чем собирать свой сканер сделал 3D модель в программе FreeCAD, так же в процессе изготовления она дорабатывалась и изменялась, но показать могу только окончательный вид модели.
Большое спасибо, что дочитали до конца.
Заходите на мой канал, там много интересных статей. Не забывайте подписываться! #дмитрий мязин