Зачем это нужно? Читайте в статье!
Есть несколько четвероногих роботов, которые очень динамичны, способны бегать и прыгать, но эти роботы, как правило, довольно дорогие и сложные, требующие мощных приводов и ног с упругостью.
Бокс Ван, доктор философии студент университета Чжэцзян в Китае связался с нами, чтобы рассказать о проекте, над которым он работал, по исследованию прыжков роботов с помощью простого и доступного оборудования.
«Мотивация для этого проекта довольно проста, - говорит Бокс.
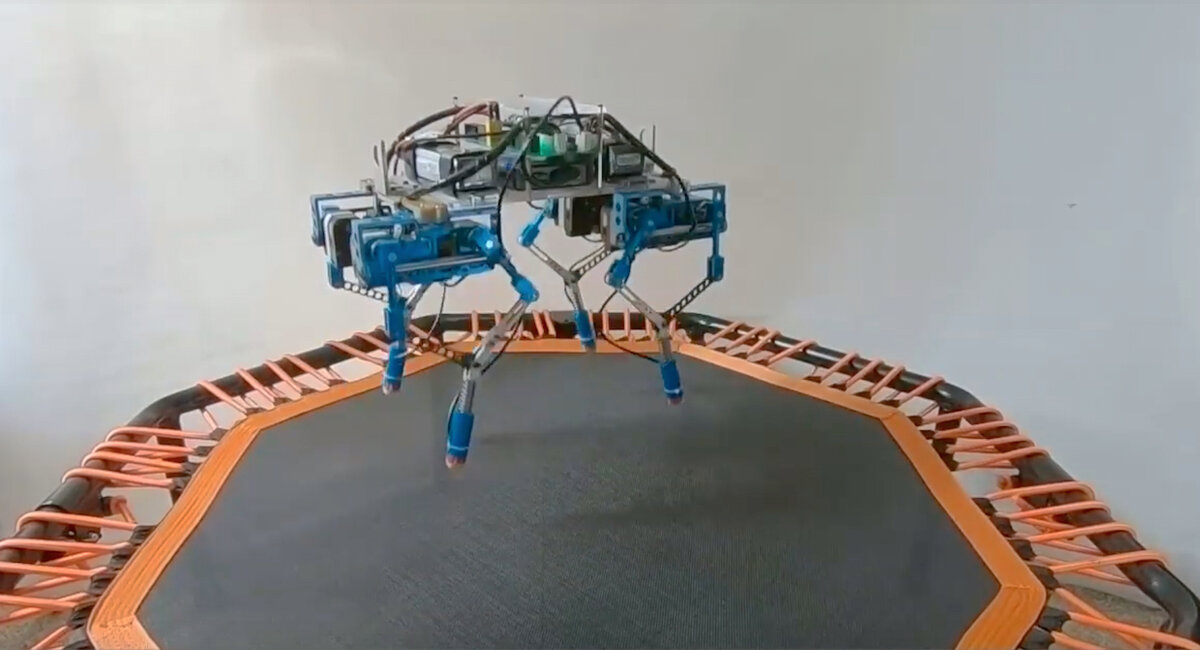
«Я хотел изучить управление четвероногими прыжками, но у меня не было мощных исполнительных механизмов, изготовленных на заказ, и я не хотел создавать эластичные ножки. Поэтому я решил использовать батут, чтобы сделать нормального четвероногого робота с сервоприводом для прыжка ».
Бокс и его коллеги хотели изучить бег и прыжки четвероногих, поэтому они создали этого робота с самыми мощными сервоприводами, к которым у них был доступ: исполнительные механизмы Kondo KRS6003RHV с максимальным крутящим моментом 6 Нм.
После некоторых простых испытаний выяснилось, что сервоприводы были недостаточно быстрыми или мощными, чтобы робот мог прыгнуть, и что для накопления энергии, помогающей роботу оторваться от земли, необходим упругий элемент.
«Обычно люди выбирают эластичные ноги», - говорит Бокс.
«Но никто в моей лаборатории точно не знал, как их проектировать. Если мы пытались сделать упругие ноги, и мы не смогли заставить робота прыгать, мы не могли быть уверены, были ли проблемы в ногах или алгоритмах управления. Что касается аппаратного обеспечения, мы решили, что лучше начать с чего-то надежного, что определенно не будет источником проблемы ».
Как выяснилось, все, что было нужно, это батут, инерциальная единица измерения (IMU) и маленькие тактильные переключатели на конце каждой ноги, чтобы обнаруживать касания и отрывы, и провести некоторые полезные исследования можно без специального робота.
У батута есть и другие преимущества - потому что он жестче по краям, чем в центре, робот стремиться прыгать по центру батута, и вы заранее получите предупреждение, если что-то пойдет не так.
«Я не могу сказать, что заставить четвероногого робота прыгать на батуте - это прорыв, - говорит нам Бокс.
«Но я считаю, что это полезно для тестирования прототипа, особенно для людей, которые заинтересованы в исследовании прыгающих четвероногих, но без подходящего робота под рукой».
Чтобы узнать больше о проекте, мы отправили ему по электронной почте несколько дополнительных вопросов.
Откуда появилась эта идея?
Бокс Ван: Идея батута пришла, когда мы пили чай с молоком.
Я не знаю, почему это произошло, может, кто-то недавно видел батут в спортзале.
И я не помню, кто именно это предложил.
Как будто кто-то сказал это непреднамеренно.
Но я понял, что батут будет идеальным выбором.
Он надежный, недорогой и должен иметь похожую динамическую модель с моделью прыжков с пружинящими ногами (мы кратко проанализировали это в статье).
Поэтому я решил попробовать батут.
Как вы думаете, как вы можете научиться использовать четвероногого робота на батуте, вместо того, чтобы использовать уже прыгающего робота?
Вообще говоря, никакие контактные поверхности не являются строго жесткими.
Все они имеют эластичность.
Таким образом, нет никаких существенных различий между прыжками на батуте и прыжками на жесткой поверхности.
Тем не менее, использование квадрупеда на батуте может дать вам больше информации о том, как использовать упругость, чтобы сделать прыжки легче и эффективнее.
Вы можете использовать роботов-четвероногих с упругими ножками для решения той же проблемы, но это обычно требует гораздо больше времени на разработку оборудования.
Мы предпочитаем рассматривать батутный эксперимент как своего рода раннее испытание для дальнейшего реального четырехугольного прототипа прыжкового робота.
Если вы не заинтересованы в создании акробатического робота на батуте, настоящий четвероногий прыжок, вероятно, является более полезным приложением, и это наша конечная цель.
Цель тестов на батуте состоит в том, чтобы сначала разработать алгоритмы управления и проверить стабильность общей аппаратной структуры.
Из-за сходства между прыжками на батуте с жесткими ногами и прыжками на твердых поверхностях с пружинящими ногами разработанные алгоритмы управления могут быть перенесены на прыгающих роботов с твердой поверхностью.
Считаете ли вы, что эта идея может быть полезна для других видов исследований в области робототехники?
Да.
Для прыжков четвероногих с пружинящими ногами алгоритмы управления могут быть сначала разработаны с помощью батутных тестов с использованием простых жестких ног.
А аппаратная конструкция для упругих ножек может быть ускорена с помощью разработанных алгоритмов управления.
Кроме того, мы считаем, что наша работа может быть хорошим примером использования робота контроля положения для реализации динамических движений, таких как прыжки или даже бег.
В отличие от других динамических роботов, каждое активное соединение в нашем роботе контролируется с помощью коммерческих сервоприводов контроля положения, а не пользовательских двигателей управления крутящим моментом.
Большинство людей не думают, что автомат управления положением может выполнять очень динамичные движения, такие как прыжки, потому что двигатели управления положением обычно означают высокое передаточное число и медленный отклик.
Тем не менее, наша работа показывает, что с помощью упругости стабильные прыжки могут быть реализованы с помощью сервоприводов контроля положения.
Поэтому те, у кого уже есть автомат для контроля положения, могут изучить потенциал своего робота с помощью батутных тестов.
Почему обучение робота прыжкам важно?
Есть много сценариев, где нужен прыгающий робот.
Например, настоящий прыжковый четвероногий может быть использован для проектирования бегущего четвероногого.
Оба испытывают моменты, когда все четыре ноги находятся в воздухе, и легче начать с прыжка, а затем перейти к бегу.
В частности, прыжок или бег могут легко стать подпрыгиванием если угол наклона контролируется.
Подпрыгивающий четвероногий похож на бегущего кролика, поэтому сейчас его уже можно назвать бегущим четвероногим.
Насколько нам известно, практическое использование прыжковых четвероногих может быть использовано для исследования планет, так же, как и SpaceBok.
В условиях низкой гравитации прыжки более эффективны, чем ходьба, и легче преодолевать препятствия.
Но если бы у меня был прыгающий четвероногий на Земле, я бы научил его ловить мяч, который я кидаю в него, в прыжке.
Это было бы чудесно!
Это было бы фантастически.
Поскольку весь смысл батута заключался в том, чтобы запустить прыжковое программное обеспечение с минимумом аппаратного обеспечения, следующим шагом является добавление пружинных ножек роботу, чтобы система управления, разработанная исследователями, могла быть испытана на твердых поверхностях.
У них есть статья, которая в настоящее время пересматривается, и к Боксингу Вану в качестве первого автора присоединились его советник Чуньлинь Чжоу, старшекурсники Зихенг Дуань и Цичао Чжу, а также исследователи Джун Ву и Ронг Сюн.
Источник: IEEE SPECTRUM
Перевод: Vipman84
Бонус: Видео прыгающего робота