Какая птица не только передвигается быстро и эффективно, но и умеет парить как насекомые, зависая на одном месте?
Конечно колибри! Уникальные птицы по размерам едва превышающие насекомых и питающиеся нектаром растений.
Самые маленькие представители рода — Колибри-пчёлки весят около двух грамм, а по размеру не превышают шести сантиметров.

Какие из летающих аппаратов, созданных человеком, отличаются максимальной мобильностью и минимальными размерами? Конечно дроны! Но из-за особенностей строения частей, обеспечивающих полет, дроны ограничены в минимальных размерах и мобильности.
Ученые из Университета Пёрдью (США) постарались найти решение, объединив разработки человека и опыт природы.
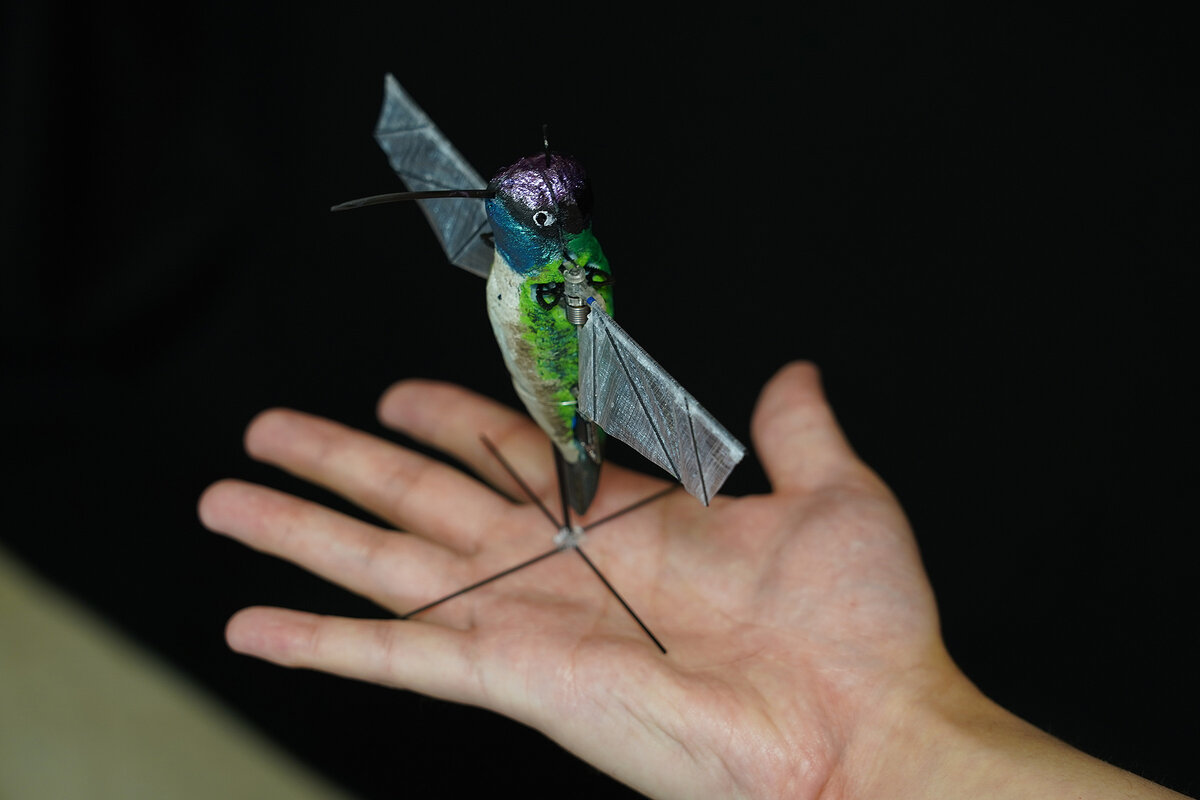
И создали робота-колибри!
Каким образом этого удалось достичь:
- тщательно проанализирован полет колибри и создана компьютерная модель тела и крыльев птицы, а также аэродинамическая модель их движения в полете;
- используя алгоритмы машинного обучения, исследователи добавили часто используемые птицей движения (развороты в полете на 180 градусов, резкие повороты и наоборот "зависания" в воздухе) и ее поведение в различных ситуациях;
- каркас (тело) робота создали с помощью 3д-печати, а для крыльев использовали углеродное волокно и тончайшие мембраны;
- для движения крыльев использованы два независимых мотора и привода, позволяющие двигать каждым крылом отдельно.
В результате удалось создать миниатюрный летающий аппарат, весом от 2 до 12 грамм (в зависимости от модели) и подъемной силой до 30 грамм.
Робот-колибри отличается высочайшей маневренностью, устойчивым полетом в зонах турбулентности и очень малошумным полетом. А внедренная система машинного обучения позволяет на ходу строить карту местности и корректировать полет.
Разработчики считают, что он будет незаменим в спасательных операциях, при поиске людей под завалами, а также в исследованиях труднодоступных мест.
Единственная проблема на сегодня — элементы питания. Пока робот не несет "на борту" элементов питания и требует подключения к внешнему источнику.
Но разработчики обещают увеличить подъемную силу и решить вопрос размещения батареи непосредственно в теле робота-колибри в кратчайшие сроки.