Рой роботов может звучать как что-то из зловещего научно-фантастического фильма. Но в реальном мире Рой роботы могли бы сделать много хорошего. Они могли бы очистить пляж от мусора, восстановить пластик из океана или построить обитаемую обитель на Марсе. Но концепция зависит от получения десятки роботов, чтобы эффективно работать вместе и избежать мешают друг другу.
"Представьте себе группу роботов, которые работают как социальные насекомые, такие как муравьи”, - говорит Мауро Бираттари, старший научный сотрудник бельгийского национального финда научных исследований (FNRS). Он стремится создать систему, которая может перевести сложные инструкции, такие как “собрать весь пластик здесь и положить его в этот контейнер”, в управляющую программу, которая будет инструктировать десятки роботов работать вместе, чтобы выполнить поставленную задачу. Он несколько величественно называет эту систему демиургом, названным в честь Бога-Творца Платона.

"Моя цель состоит в том, чтобы продвинуть современное состояние в робототехнике Роя путем развивать Демиурга: умный система которая может конструировать и осуществить рои робота в полностью интегрированном и автоматический способ", - объясняет Бираттари.
Его Демиург система выберет как оптимальное оборудование, так и программные модули, необходимые для выполнения каждого задача. Он будет использовать библиотеку программ низкого уровня, которые он может объединить на муха. "Программировать каждого одиночного робота так, что роботы совместно сделают что мы хотим, чтобы они сделали это сложная проблема, потому что они взаимодействуют друг с другом непредсказуемым образом", - объясняет Бираттари. "Сегодня в основном это делается вручную с разработчиками программируя роботы в пути который кажется разумным и после этого использование проб и ошибок для улучшения общей системы.
Конечно, роботы Бираттари не похожи на высокотехнологичные модели "Звездных войн". Например, один из его роботы для сбора мусора могут напоминать простой пылесос. “Программирование эти роботы не так сложны, как программирование гуманоидного робота, но это по-прежнему трудно предсказать взаимодействие между двумя или более машинами,” - Говорит бираттари. Для этого он использует так называемые "эвристические" методы: в основном, методы правила большого пальца, чтобы найти достаточно хорошие, а не совершенные решения.
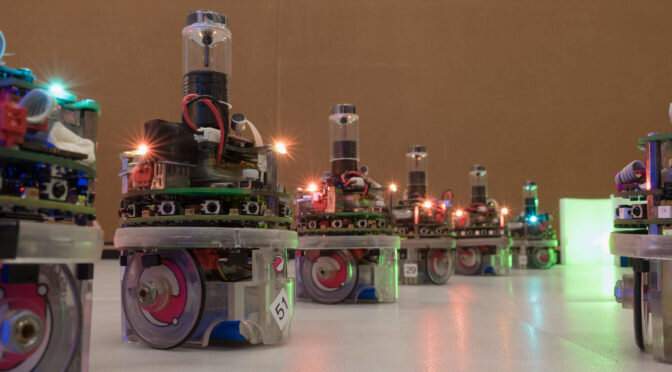
В рамках проекта, только начатого при финансировании ERC, Бираттари и его команда разрабатывают доказательство концептуальной системы для автоматического зачатия и программирования Роев роботов, которые могут быть продемонстрированы в лаборатории. “Он сможет взять описание миссии, создать программное обеспечение для управления этой миссией и развернуть программное обеспечение на роботах, чтобы роботы выполняли миссию”, - говорит он. "Это будут достаточно простые миссии, но нетривиальные и с функциями, которые отображают реальный мир.Например, мы могли бы работать с 30-50 простыми исследовательскими роботами, которые могут толкать объекты в один угол среды, в которой они работают.
Военные находятся на переднем крае развития робототехнических Роев: было бы явным преимуществом посылать дроны, а не солдат, в зоны конфликта. Сегодня военные дроны управляются дистанционно, но в будущем автономные роботы могут работать вместе, чтобы обезопасить территорию или обезвредить мины. Конечно, исследования ERC Бираттари являются гражданскими, а не военными. И первые гражданские приложения, такие как управление запасом на складе, будут более простыми – но не менее важными экономически. Amazon и Carrefour, обратите внимание.