Микророботы, которые могут образовывать рой разной формы.
Совсем недавно, мы рассказывали вам про роботов состоящих из частиц, в этой статье речь идёт о схожей технологии. Команда исследователей из Харбинского технологического института в Китае и Мичиганского государственного университета в США разработала способ управления микророботами способными объединяться в рой, и формировать различные типы фигур. В своей статье, опубликованной в журнале Science Robotics, группа описывает своих крошечных роботов, что они могут сделать, и возможные способы их использования.
За последние несколько десятилетий ученые и инженеры работали над созданием роботов, которые настолько малы, что могут плавать внутри живого тела. Считается, что когда-нибудь такие роботы смогут доставлять лекарства к эпицентрам болезней в организме или, возможно, оставаться в организме, работая совместно с иммунной системой для предотвращения заболеваний. В этом новом усилии исследователи сделали еще один шаг в этом направлении, разработав способ управления роем крошечных роботов, и приданию этим роям различных форм.
Исследователи отмечают, что до сих пор инженеры разрабатывали крошечные роботы, которые формируют и работают в роях, но только в одной форме, что ограничивает их полезность. Исследователи, работающие в Китае, сообщают, что их крошечные роботы смогли сформироваться в четыре различные формы роя – жидкость, лента, цепь и вихрь. И любой из них может быть сформирован по требованию.
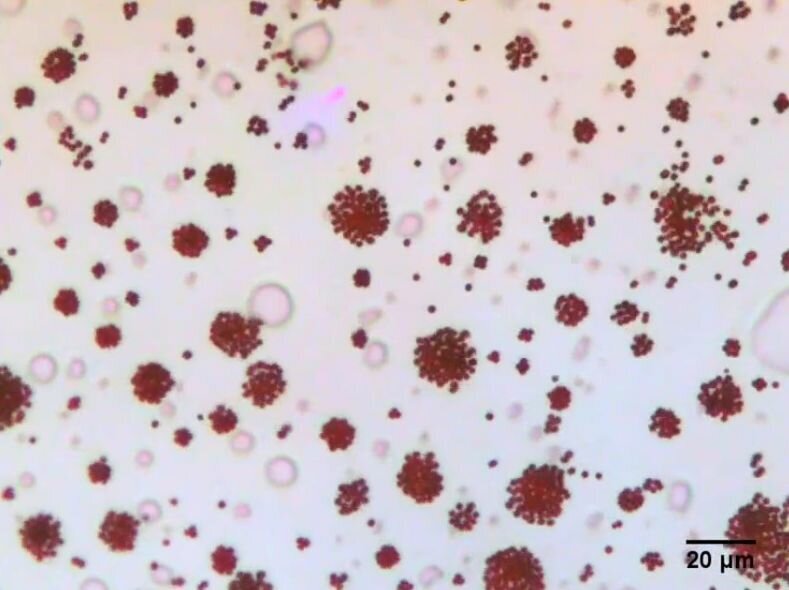
Роботы в экспериментах на самом деле представляли собой только отдельные зерна гематита – их суспендировали в жидкости и манипулировали с помощью специализированных магнитов. Контролируя частоту и направление магнитного поля, исследователи смогли заставить каждого робота вращаться, колебаться и падать независимо друг от друга. Когда магнитное поле контролировалось для всей группы роботов, результатом был контролируемый рой.
Четыре различных самоорганизованных образования микророботов: жидкость (равномерно распределенная структура роботов), цепочки (роботы соединены в длинные и параллельные ряды), лента (более короткие, параллельные ряды роботов) и вихрь (круговые толпы роботов).
Исследователи отмечают, что для перехода от одной части тела к другой, рой должен иметь возможность формировать себя в различных конфигурациях. Для перемещения через такой орган, как, например, желудок, может потребоваться рой, просто чтобы двигаться как масса. С другой стороны, для перемещения по каналу потребуются такие формы, как цепь, змея или червяк. А для перемещения груза внутри тела потребуется рой, чтобы объединиться в такую форму, как вихрь для коллективного удержания.
Видео показывает трансформацию жидкости в вихрь, ленту в вихрь и цепочку в вихрь. Также показано направленное управление вихревыми образованиями.
Видео слияния двух микророботов.
Видео, показывающее поколение гигантского вихря.
Видео показывает точность контролируемого движения ленточных, вихревых и цепных образований.
Видеоролик, демонстрирующий проверку способности вихревых, ленточных и цепных микророботов проходить через узкий канал.