«Робот из частиц» работает как группа простых единиц.

Основываясь на поведение биологических клеток, исследователи из Массачусетского технологического института, Колумбийского университета и других стран разработали простых в вычислительном плане роботов, которые объединяются в большие группы для перемещения, транспортировки объектов и выполнения других задач.
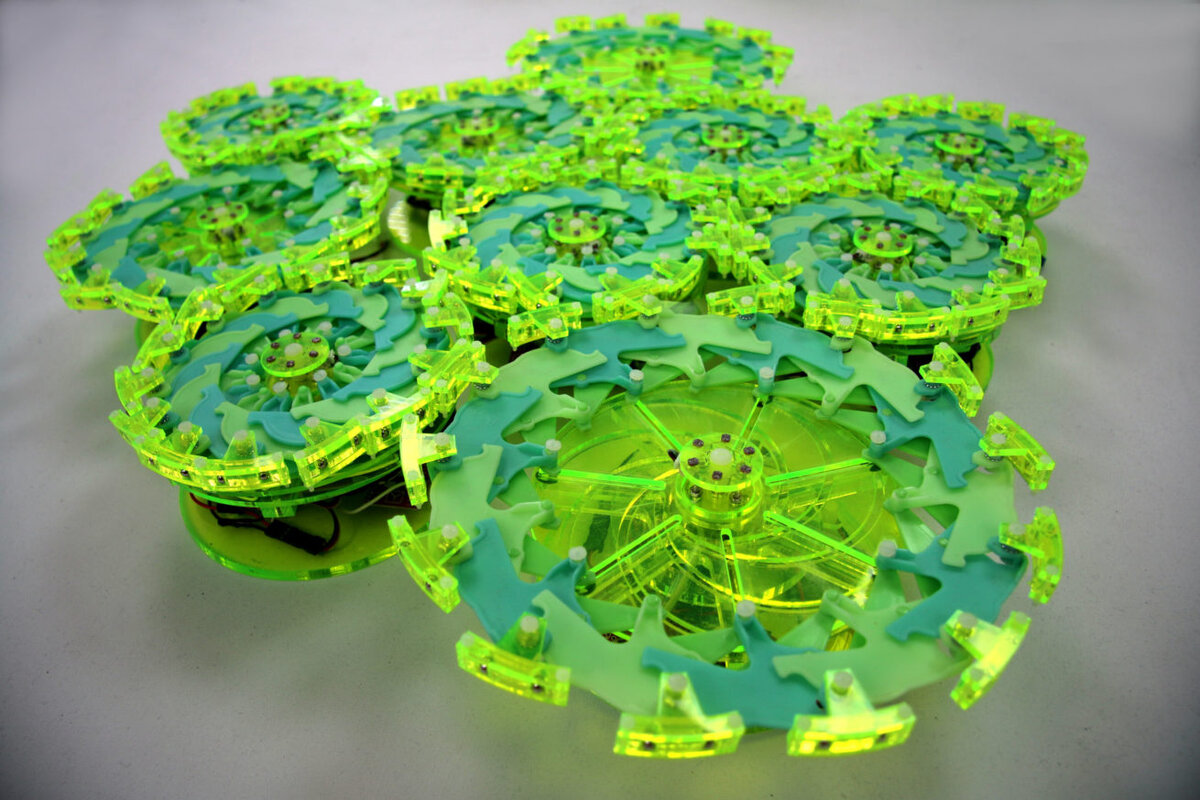
Эта так называемая система «робототехники частиц», основанная на проекте, разработанном исследователями из Массачусетского технологического института, Колумбийского университета, Корнельского университета и Гарвардского университета, включает в себя множество отдельных дискообразных блоков, которые очень точно подходят под определение «частиц». Частицы связаны между собой магнитами по периметру. Каждая частица может делать только две вещи: расширяться и сжиматься. Но это движение, когда оно тщательно рассчитано, позволяет отдельным частицам толкать и тянуть друг друга в согласованном движении. Бортовые датчики позволяют кластеру притягиваться к источникам света.
В газете Nature исследователи демонстрируют кластер из двух десятков реальных роботизированных частиц и виртуальное моделирование до 100 000 частиц, движущихся через препятствия к лампочке. Они также показывают, что робот-частица может транспортировать объекты, расположенные в его центре.
Роботы-частицы могут образовывать различные конфигурации и плавно перемещаться по препятствиям и проходить сквозь узкие промежутки. Примечательно, что ни одна из частиц напрямую не взаимодействует друг с другом, чтобы функционировать, поэтому частицы могут быть добавлены или удалены без какого-либо воздействия на группу. В своей статье исследователи показывают, что роботизированные системы частиц могут выполнять задачи, даже если многие из частиц работают со сбоями.
Исследователи считают, что подобные роботы, состоящие из таких вот упрощенных устройств/частиц, могут образовывать более масштабируемые, гибкие и надежные системы.
Это видео демонстрирует, работу одной частицы сбоку и сверху. На видео также можно увидеть движение частиц робота в группе, единым кластером. Частицы колеблются с фазовой задержкой на основе положения.
«У нас есть небольшие роботизированные ячейки, которые не так способны, как отдельные люди, но могут многого добиться в группе», – говорит Даниела Рус, директор Лаборатории компьютерных наук и искусственного интеллекта (CSAIL), а также профессор электротехники Эндрю и Эрна Витерби и Информатика. «Роботизированная частица сама по себе статична, но когда она соединяется с другими частицами робота, эта группа может исследовать мир и управлять более сложными действиями. С помощью этих «универсальных ячеек» частицы робота могут принимать различные формы, выполняя задачи, например, следование за светом. Это очень мощно “.
Каждое устройство робота-частиц имеет цилиндрическое основание с батареей, небольшим двигателем, датчиками, которые определяют интенсивность света, микроконтроллер и компонент связи, который отправляет и принимает сигналы. Сверху установлена детская игрушка, которая называется «Полетное кольцо Хобермана», которая состоит из маленьких панелей, соединенных в круговую форму, которую можно тянуть, чтобы расширить круг и нажать, чтобы его сжать. Два маленьких магнита установлены на каждой панели.
В этом видео показано поведение, демонстрируемое роботом из частиц: движение по направлению к источнику света, совместная транспортировка объектов и обход препятствий.
Хитрость заключается в том, чтобы запрограммировать частицы робота на расширение и сжатие в точной последовательности, чтобы подтолкнуть всю группу к источнику света. Для этого исследователи оснастили каждую частицу алгоритмом, который анализирует передаваемую информацию об интенсивности света от каждой другой частицы, без необходимости прямой связи между частицами.
Датчики частицы определяют интенсивность света от источника света; чем ближе частица к источнику света, тем больше интенсивность. Каждая частица постоянно передает сигнал, который разделяет воспринимаемый уровень интенсивности со всеми другими частицами. Скажем, роботизированная система частиц измеряет интенсивность света по шкале от 1 до 10: частицы, ближайшие к свету, регистрируют уровень 10, а самые дальние – уровень 1. Уровень интенсивности, в свою очередь, соответствует определенному времени, в течение которого частица должна расшириться. Частицы, испытывающие наибольшую интенсивность – уровень 10 – расширяются первыми. Когда эти частицы сжимаются, следующие частицы сжимаются по порядку, а затем расширяются. Это расширение и сжатие по времени происходит на каждом последующем уровне.
«Это создает механическую волну расширения-сжатия, скоординированное движение, которое перемещает большой кластер в сторону внешних факторов или от них», – говорит Ли Шугванг, ведущий автор исследования. Ключевым компонентом, добавляет Ли, является точная, как часы, синхронизация между частицами, которая обеспечивает максимально эффективное движение: «Если вы испортите эти “часы”, система будет работать менее эффективно».
В видеороликах исследователи демонстрируют роботизированную систему частиц, движущихся и меняющих направления к разным лампочкам, когда они включаются, и прокладывающих себе путь сквозь пропасть между препятствиями. В своей статье исследователи также показывают, что моделируемые кластеры, содержащие до 10 000 частиц, поддерживают движение с половинной скоростью, даже при сбое до 20% единиц.
«Это немного похоже на общеизвестную “серую слизь”(“grey goo”, англ.), – говорит Ход Липсон, профессор машиностроения в Колумбийском университете, ссылаясь на научно-фантастическую концепцию самовоспроизводящегося робота, содержащего миллиарды наноботов. «Ключевым новшеством здесь является то, что у вас есть новый тип робота, у которого нет централизованного управления, нет единой точки отказа, нет фиксированной формы, а его компоненты не имеют уникальной идентичности».
Следующим шагом, добавляет Липсон, является миниатюризация компонентов для создания робота, состоящего из миллионов микроскопических частиц.