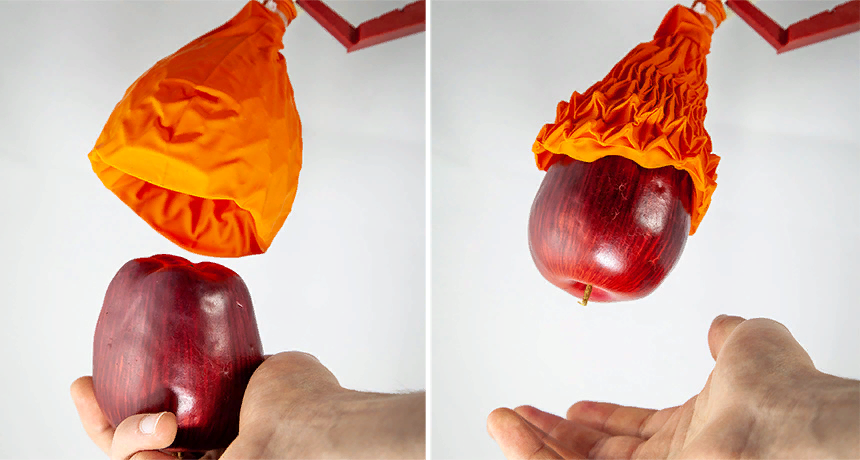
Колоколообразный захват состоит из силиконовой резины с затейливым дизайном оригами, обернутой в воздухонепроницаемой коже из латексной резины. Когда воздух высасывается из захвата, кожа сжимается, заставляя скелет оригами свернуться в узкую воронку.
Шугуан Ли, робототехник из Гарвардского университета и MIT, а так же его коллеги планируют представить это устройство на международной конференции по робототехнике и автоматизации, которая проходит в мае в Монреале.
В лабораторных экспериментах данный мягкий "захват" поднимал предметы домашнего обихода различных размеров и форм, успешно поднимая среди прочего смартфон и кружку. В то время как жестким роботизированным рукам не хватает ловкости и они могут схватить и поднять тонкие или бьющиеся предметы, этот резиновый "захват" мягко обхватывает различные предметы, такие как мягкие фрукты и бокалы для вина.
И в отличие от других мягких роботизированных рук, которые с трудом поднимают тяжелый груз, это устройство могло поднимать до 12 килограммов — более чем в 120 раз больше собственного веса. Эта способность позволила "захвату" поднять электрическую дрель и полную бутылку вина. Такая разносторонняя сжимай-машина смогла бы работать на сборочном конвейере фабрики, заменяя роботизированные руки. Такому устройству несложно найти хорошее применение.
Ссылка на оригинал: https://www.sciencenews.org/article/origami-design-helps-robot-lift-delicate-and-heavy-cargo.
Перевод и обработка: КИП.