Океан полный роботов: на поверхности, в глубине и над ним

Во многих языках два, казалось бы, разных процесса (действия) — понять и поймать/схватить/уловить — обозначаются одним и тем же словом (begreifen, to catch, saisir, …). Что же схватывается (улавливается) в процессе понимания? Ответ очевиден — смысл.
Пытаясь передать читателю некий важный для меня смысл, я условно бросаю его читателю, а тот пытается (или не очень) его поймать/схватить/уловить. Как если бы я бросал мяч в сторону читателя, а тот его на лету ловил.
Смысл бывает тяжелый и громоздкий (как холодильник). И тогда, даже если я в состоянии кинуть его в сторону читателя, поймать его будет весьма проблематично (скорее, он читателя просто ушибет, а то и придавит).
Поэтому я стараюсь бросать в читателей не очень тяжелые и, по возможности, округлые (одинаковые при рассмотрении с разных сторон) смысловые мячи.
Но иногда бросаю не точно, и смысл оказывается читателем не пойман.
Порой же сам читатель не шелохнется и даже руки не поднимет. И тогда мой точно выполненный бросок смысла бьёт читателя в лоб и отскакивает в сторону. Не поймавший смысл читатель, понятно, недовольно потирает лоб и начинает подумывать, стоит ли вообще продолжать со мной эту смысловую игру.
Вот свежий пример — мой прошлый пост «Самодельный робот-собачка за $1K — предвестник революции роботов».
Брошенный мною смысловой мяч означал,
что техно-революции, обычно, происходят не вследствие кардинальных функциональных прорывов, а при обвальном снижении цен на технологические продукты.
Однако многие читатели этот смысл не уловили. Дело в том, что на мяче, в этот раз была нарисована робот-собачка, а также упомянутые в контексте техно-революций всякие бытовые гаджеты (айфоны, айпады …)
Это все и испортило. Многие из поймавших мяч читателей были убеждены, что пойманный ими смысл именно в собачке (или в гаджетах). И сосредоточили свое внимание на критике довольно скудного функционала собачки, не стоящего, по их мнению, кило баксов.
Моя вина. НЕчего было мяч с собачкой бросать, да еще и не совсем точно. Собачка оказалась столь привлекательным объектом, что ее смысл поймали все, а мой смысловой мяч просто улетел мимо.
Поэтому исправляюсь. И бросаю тот же смысловой мяч снова.
В техно-революции роботов сейчас главное — научиться кардинально снижать себестоимость. А нужный и ценный функционал роботов — он вообще не в области человеческой бытовухи, а совсем в иных областях.
Робот-собачка, как и робот-стюард или бармен — даже с самым совершенным функционалом — не так, чтобы очень ценен (уж люди как-то сами справляются). А вот робот для освоения океана, работы на орбите, в эпицентре пожаров — это самое оно. Но нужно цену сильно понизить, научившись делать просто весьма непростые вещи.
В качестве иллюстрации, вот вам пример — на мой взгляд, прямо «окно в будущее» из журнала «Техника молодежи» (так в середине прошлого века в СССР представляли техно-утопию 21 века).
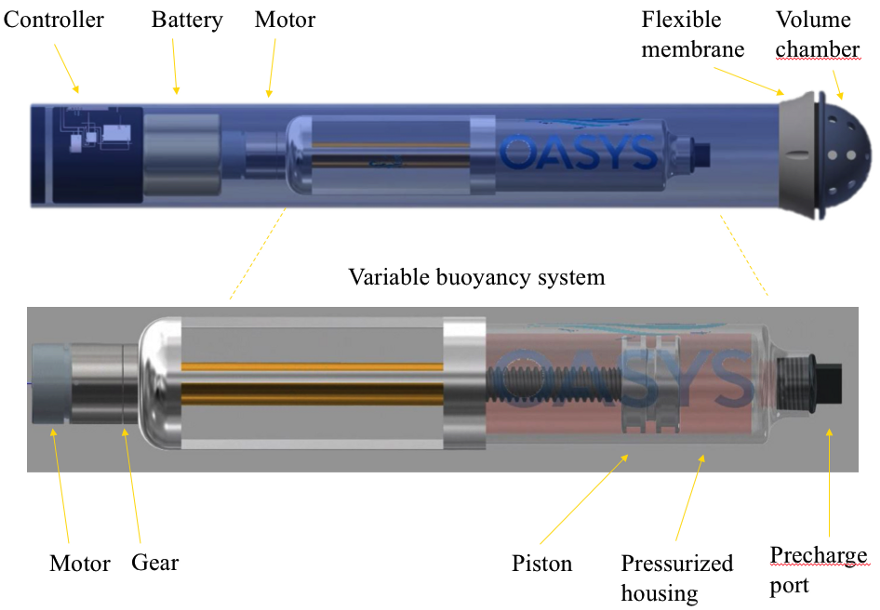
Шикарный норвежский проект OASYS — автономная система наблюдения за океаном для мониторинга и сбора данных с использованием роботов 3х типов:
- миниатюрных беспилотных подводных глайдеров, оснащенных системой переменной плавучести (СПП);
- спец-дронов (понятно, что тоже беспилотных);
- беспилотных катеров класса “АвтоНаутилус”.
СПП — это одна из главных фишек проекта. Она состоит из заполненной газом камеры и линейного привода, приводимого в движение бесщеточным двигателем постоянного тока и перезаряжаемой литиево-ионной батареи в гибком корпусе, заполненном маслом.
Вся система наблюдения за океаном сводит вмешательство человека к минимуму, революционизируя доступность широкого спектра операций по наблюдению и сбору данных о малейших флуктуациях в океане, что выведет на новый уровень решение многих задач: от рыболовства до предсказания погоды и стихийных бедствий. Посему отдача от нее будет в десятки миллиардов.
Цель проекта в том, чтобы максимально уменьшить общую сложность, вес и стоимость всей системы наблюдения за океаном.
Первый прототип уже построен и продемонстрирован в небольшом аквариуме. Электронные компоненты были испытаны на установке для опрессовки до минимума 20 бар. Предварительные результаты многообещающие. Продолжение работ будет сосредоточено на оптимизации системы, ее веса и стоимости, стратегии развертывания/восстановления, а также на морских испытаниях на глубине до 200 м.
Только представьте эту картину не слишком отдаленного будущего.
Роботизированные катера патрулируют океаны, выпуская подводные глайдеры для сбора информации об окружающей среде, и служа базой для дронов, управляющих глайдерами, собирающих их на роботизированные катера, а также служащих своего рода распределенной в воздухе антенной для ретрансляции радио сигналов между катерами и глайдерами.
А теперь представьте, что люди смогут сделать с помощью таких систем.
Это будет новый дивный OceanWorld, полный роботов, чувствующих и мгновенно реагирующих на легчайшие колебания в окружающей среде и тем самым позволяющий человечеству решать немыслимые раньше задачи.
И никаких проблем с уже имеющимся функционалом нет. Осталось только радикально снизить цену.
И будет нам OceanWorld.
Подробности и детали проекта OASYS см. на платформе GroundAI(кстати, только что обнаружил, что эта революционная платформа для scholarly peer review for AI research никак не известна в Рунете — воистину, мы с вами живем на краю земного диска в вопросах, касающихся ИИ).
________________________________
Если понравился пост:
- нажмите на “палец вверх”;
- подпишитесь на обновления канала на платформе Яндекс Дзен;
- оставьте комментарий.
Еще больше материалов на моем Телеграм канале «Малоизвестное интересное». Подпишитесь