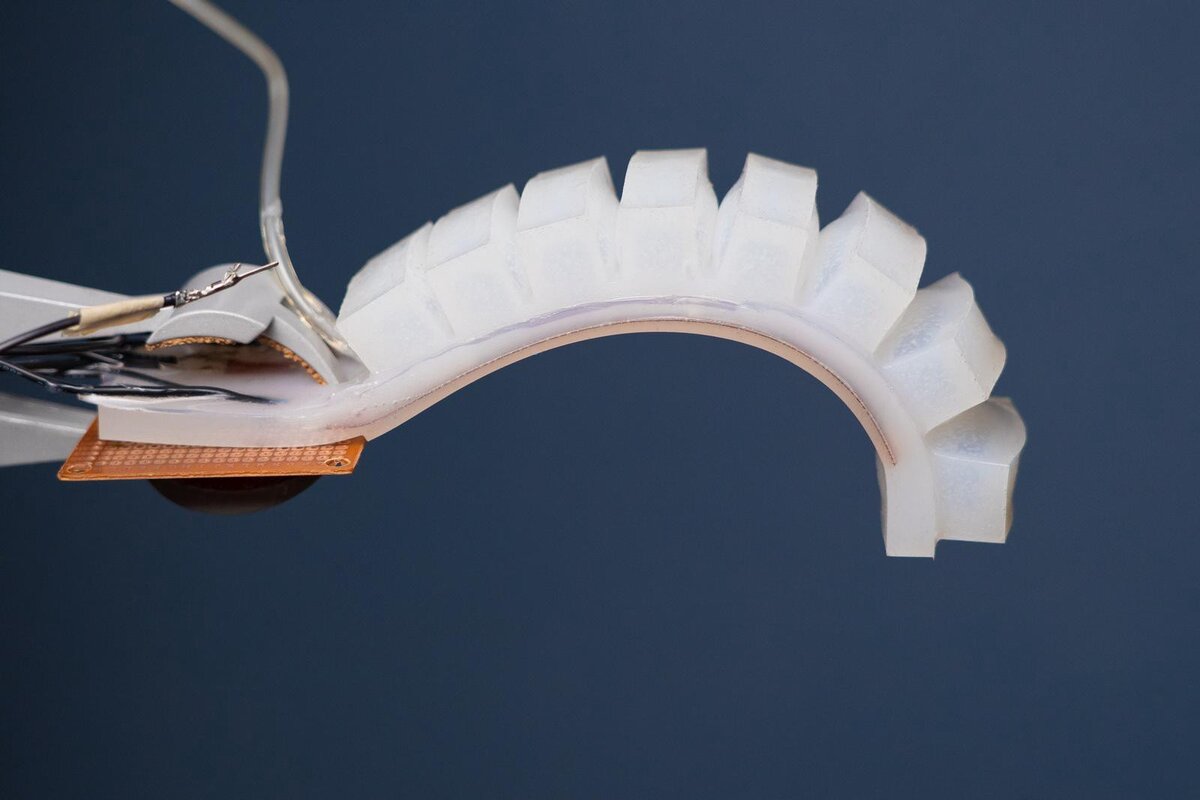
Мягкая робототехника - это быстро развивающаяся область, которая имеет огромный потенциал в приложениях, где традиционные жесткие роботы были бы небезопасны или громоздки. Но создание мягкого робота сопряжено с рядом уникальных задач, особенно когда речь идет о приведении в действие и определении положения. К счастью, недавно разработанный мягкий роботизированный палец с собственным чувством самовосприятия может значительно улучшить ситуацию.

Эта работа сделана командой исследователей из Лаборатории робототехники и дизайна Bioinspired в Университете Калифорнии в Сан-Диего и других специалистов по всему миру. Он предназначен для того, чтобы дать мягким роботам тот тип позиционного зондирования, который практичен для жестких роботов . Поскольку рама традиционного робота негибкая, определить ее точное положение относительно просто - вам нужно только измерить угол на каждом стыке. Но из-за присущей им гибкости это не так просто с мягкими роботами.
Решение, которое пришли исследователи, состояло в том, чтобы использовать нейронную сеть и машинное обучение для определения корреляции между показаниями системы захвата движения и гибкими датчиками в мягком роботизированном пальце. Гибкие датчики были размещены несколько произвольно, что, как правило, было бы чрезвычайно сложно обработать с помощью явного программирования. Но, используя нейронную сеть, система может сопоставить эти показания датчика с тем, что она видит в системе захвата движения.
Это приводит к тому, что у робота развивается ограниченное чувство проприоцепции, то есть чувство, которым обладают люди и другие животные, что позволяет нам узнать, как расположены тела. Например, проприоцепция - это то, как вы можете ходить, даже когда ваши глаза закрыты. После тренировки захват системы может быть удален из системы, и роботизированный палец все равно сможет точно позиционировать себя, а также будет знать, действует ли на него внешняя сила. Это большой шаг вперед в предоставлении мягким роботам чувствительных возможностей, необходимых для работы в реальном мире.