Технологии сканирования. В настоящее время в эхолотах применяются несколько основных технологий сканирования.
1. Двухлучевая технология.
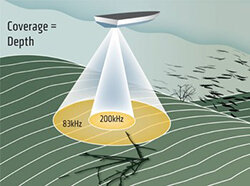
Датчик эхолота излучает два конусных луча, например 20 ° и 60 °, на частоте 200 и 83 кГц, которые находятся один в одном. Узкий луч на более высокой частоте позволяет получить максимальную детализацию и точность определения рельефа дна. Технология не позволяет определить контуры объекта в виду применения узкого луча.
2. Технология Down Imaging
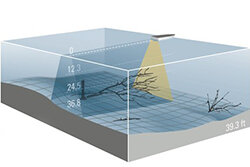
Технология Down Imaging позволяет получить детализированную картинку непосредственно под лодкой. Для создания изображения высокого разрешения, чаще всего, используют частоты 800 кГц (45 °) и 455 кГц (75 °). Используемые частоты позволяют просканировать подводное пространство от 30 до 100 метров в глубину. Технология не позволяет определить контуры объекта только под лодкой.
3. Side Imaging
Отличие технологии в том, что лучи от трансдьюсера расходятся в две стороны от лодки, что позволяет получить отображение справа и слева с высоким разрешением на расстоянии до 75 м. При этом на экране эхолота абсолютно понятно, где находится цель и расстояние до нее. Данная технология используется при поиске затонувших предметов с максимально широким захватом. Технология Side Imaging является основной при проведении поисковых работ на водоемах.
4. Технология 3D
Технология позволяет сканировать водное пространство, как впередсмотрящий, так и под лодкой. Впередсмотрящий датчик значительно облегчает плавание в незнакомых водах. В современных 3D эхолотах уже используется более ста лучей. На данном этапе развития технология уступает по детализации объектов технологии Side Imaging.
5. Технология CHIRP
По существу, технология CHIRP вместо одного частотного импульса в посылке, использует несколько на разных частотах. Благодаря вычислительным возможностям современного эхолота, отраженные данные нескольких частот одновременно обрабатываются и в результате, на экране появляется изображение высокой четкости.
6. Технология 360 Imaging
Данная технология позволяет сделать 360-градусный обзор подводного мира в радиусе 45 метров. Уникальность технологии заключается в том, что в отличии от других технологий, обзор производится с заякоренной лодки. В основе технологии круговое сканирование с технологией Side Imaging. Важной особенностью технологии является то, что технология 360 Imaging позволяет использовать эхолот, как впередсмотрящий с углом сканирования от 10 до 360 град.
7. Звуковизеры
Данные устройства представляют собой миниатюрные многолучевые гидролокаторы, работающие на высокой частоте (от 450 кГц до 1 Мгц). При работе в реальном режиме времени оператору выводится изображение подводного пространства с качеством близким к изображению видеокамеры. На мой взгляд данная технология будущее в поисковых системах, но на данном этапе развития данная технология уступает Side Imaging в производительности- скорости обследования больших акваторий водоема.
Поиск затонувшего объекта производится эхолотом с функцией бокового обзора Side Imaging . Поиск ведется методом галса. С каждым новым прохождением по акватории производится смещение по курсу на 10-20 метров, в зависимости от глубины.