Исследователи создали первый мягкий робот, имитирующий растительные усики. Он способен скручиваться и лазить, используя те же физические принципы, которые определяют перенос воды в растениях. Он способен обвиваться вокруг стебля растения, скручиваться и перемещаться.
Исследователи из IIT-Istituto Italiano di Tecnologia - небольшая, но хорошо укомплектованная команда с опытом в различных научных отраслях - продемонстрировали первые мягкие роботы, имитирующие усики живых растений.
Исследовательскую группу возглавляет Барбара Маццолай, биолог с докторской степенью по инженерии микросистем. В команду экспериментаторов также входят Эдоардо Синибальди, авиационно-космический инженер с докторской степенью по прикладной математике, и Индрек Муст, технолог по материалам с докторской степенью в области техники и технологий.
Исследователи черпали вдохновение в растениях и их движении. Действительно, будучи неспособными убежать (в отличие от животных), растения связывают свое движение с ростом, и при этом они постоянно адаптируют свою морфологию к внешней среде.
Исследователи изучили естественные механизмы, с помощью которых растения используют транспорт воды в своих клетках, тканях и органах для перемещения, а затем воспроизвели его в искусственном усике.
Гидравлический принцип называется «осмос» и основан на присутствии мелких частиц в цитозоле, внутриклеточной растительной жидкости.
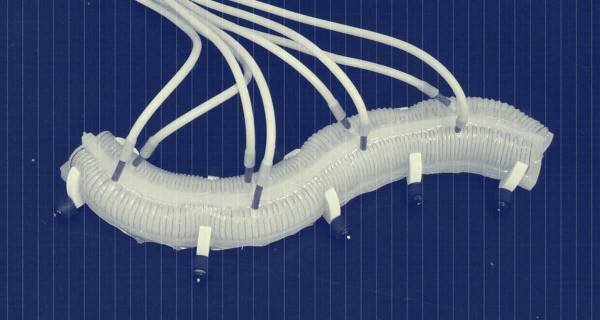
Мягкий робот изготовлен из гибкой ПЭТ-трубки, содержащей жидкость с электрически заряженными частицами (ионами). При использовании батареи 1,3 В эти частицы притягиваются и иммобилизируются на поверхности гибких электродов в нижней части усика, их движение вызывает движение жидкости. Чтобы вернуться назад, достаточно отсоединить электрические провода от аккумулятора и соединить их.
Возможные применения разработки будут варьироваться от носимых технологий до создания гибкого роботизированного оружия для разведки. Задача имитации способности растений перемещаться в изменяющихся и неструктурированных средах только началась.