В статье описывается инвертор напряжения для питания трехфазного электродвигателя. Инвертор осуществляет ручное скалярное управление работой электродвигателя.
В современном частотно-регулируемом электроприводе можно выделить три основные составляющие:
1. Преобразователь электроэнергии (выпрямитель-инвертор).
2. Система управления.
3. Асинхронный электродвигатель.
Преимущественно в частотно-регулируемых приводах применяется простая схема, состоящая из неуправляемого выпрямителя и независимого инвертора напряжения.
В регулируемых электроприводах переменного тока используются три основные структуры системы автоматического регулирования:
1. Реализация заданной статической зависимости между частотой и действующим значением напряжения U, питающего электродвигатель (скалярное управление электроприводом).
2. Алгоритм векторного управления.
3. Алгоритм прямого управления моментом.
При скалярном управлении контур управления разомкнут. Частота вращения электродвигателя в этом случае определяется моментом нагрузки и выходной частотой преобразователя f. Выходное напряжение преобразователя зависит от частоты и определяется соотношением K=U/f. Для каждого конкретного случая эта зависимость может иметь различный угол наклона U/f.
Система автоматической регулировки должна измерять фазные токи IА, IВ и вычислять активное значение тока, пропорциональное моменту. Область применения такого преобразователя с системой скалярного типа: насосы, вентиляторы, центрифуги, конвейеры.
Система автоматического регулирования с векторным управлением используется для регулирования частоты вращения или момента электродвигателя. Типичное применение: краны, подъемники, лебедки. Такое управление требует измерения тока статора IА, IВ и числа оборотов ротора двигателя. Полученные сигналы вводятся в математическую модель асинхронного электродвигателя. Система автоматического регулирования прямого управления моментом основана на реализации во времени работы двух моделей:
1. Регулирование в скользящем режиме вектора потокосцепления статора и момента М электродвигателя по значениям, их заданных и действительных величин. Такое регулирование осуществляется модулем сверхбыстрых процессоров.
2. Модель асинхронного электродвигателя через каждый промежуток времени осуществляет вычисление действительных значений потока статора и момента по вводимой в нее (модель) информации: токам фаз статора, напряжению звена постоянного тока и положению ключей инвертора. Кроме того, производится вычисление скорости асинхронного двигателя и частоты выходного тока инвертора. Этот метод прямого управления моментом привлекателен тем, что отсутствует широтно-импульсная модуляция и не используется датчик вращения электродвигателя.
Из сказанного следует, что реализовать два последних метода САР часто затруднительно.
В большинстве преобразователей частоты для формирования синусоидального тока в статорной обмотке асинхронного двигателя используется ШИМ (широтно-импульсная модуляция). Наряду с массой преимуществ такой способ получения синусоидального тока не свободен от существенных недостатков, главный из которых заключается в том, что для получения малых гармонических составляющих тока необходимо значительно увеличить частоту переключений ключей инвертора (до 20...25 кГц). Это вызывает рост динамических потерь в ключах инвертора, а также усложнение и без того тяжелых энергетических условий, в которых работают силовые элементы схемы. Кроме того, принцип ШИМ не позволяет полностью использовать напряжение источника питания, особенно в случаях, когда необходимо реализовать повышенный момент на валу асинхронного двигателя.
Работа инвертора
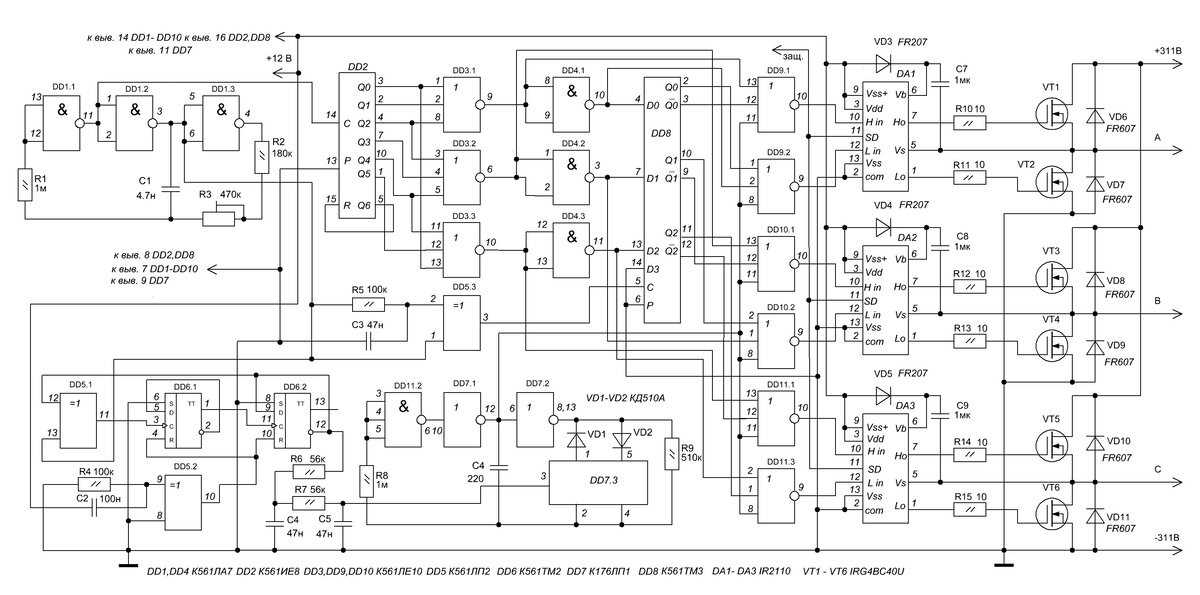
На рис.1 показана принципиальная схема автономного инвертора напряжения для питания трехфазного асинхронного двигателя. Это устройство реализует ручное скалярное управление электродвигателем, поскольку нет обратной связи (не контролируется величина тока в обмотках статора). Реализация заданной статической зависимости между частотой f и действующим значением напряжения U, питающего электродвигатель, осуществляется вручную.
Задающий генератор выполнен на основе 3 инверторов DD1.1–DD1.3. Скважность его импульсов близка к 50%, и генератор работает на частоте, определяемой выражением F~1/[0,5(R2+R3)C1]. Такой генератор мало чувствителен к изменениям величины напряжения питания. Регулирование частоты генератора (а, следовательно, и выходной частоты преобразователя) осуществляется резистором R3.
Широтно-импульсный модулятор построен на микросхеме DD7 и инверторе DD11.2. Микросхема DD7 (западный аналог этой микросхемы CD4007) содержит два инвертора и два полевых (р-канальный и n-канальный) транзистора. Сопротивление каналов этих транзисторов почти линейно зависит от входного напряжения. Полевые транзисторы включены через диоды VD1 и VD2 параллельно резистору R9.
При высоком уровне напряжения на выходе генератора диод VD2 будет проводить, т.е. выходное сопротивление р-канала транзистора DD7.3 будет включено параллельно с резистором R9. Подобным же образом выходное сопротивление n-канального транзистора включается параллельно резистору R9 при низком уровне на выходе генератора.
Широтно-импульсный модулятор реализуется изменением скважности импульсов генератора в соответствии с входным напряжением, поступающим с двухзвенной интегрирующей цепочки R6C4, R7C5. Само изменение частоты колебаний минимально зависит от их скважности, так как выходное сопротивление одного транзистора возрастает, а другого всегда уменьшается при любой величине управляющего напряжения. Таким образом, среднее за период значение шунтирующего резистор R9 сопротивления остается постоянным. Частота колебаний генератора соответствует 10 кГц. Увеличение управляющего напряжения, поступающего на модулятор, приводит к увеличению длительности выходных импульсов. Уменьшение управляющего напряжения, соответственно, приводит к уменьшению длительности импульсов выходного сигнала. При этом частота колебаний остается неизменной.
Выходной сигнал задающего генератора (DD1.1–DD1.3) подается на вход 13 DD5.1 (с выв. 3 DD1.2), а также на тактовый вход 14 DD2 (с выв. 11 DD1.1).
На микросхеме DD2 выполнен десятичный счетчик-делитель частоты с дешифратором. Если на входе «разрешение» 13 ИМС DD2 присутствует низкий уровень, счетчик считает импульсы по положительному перепаду на тактовом входе 14. При высоком уровне на входе 13 ИМС DD2 действие тактового входа запрещается, и счет останавливается.
Высокий уровень на входе сброса R (выв. 15) DD2 счетчика устанавливает его в «нулевое» состояние. На каждом выходе счетчика-дешифратора DD2 высокий уровень последовательно появляется только на длительность периода тактового импульса.
Выходные импульсы с выходов микросхемы DD2 формируются в трехфазную импульсную последовательность с помощью микросхемы DD3. Микросхема DD4 осуществляет инверсию трехфазной импульсной последовательности.
С помощью D-триггеров микросхемы DD8 получают трехфазную импульсную последовательность, задержанную относительно исходной.
Из прямых и инверсных выходных сигналов микросхем DD3.1–DD3.3, DD4.1–DD4.3 и триггеров DD8 логические элементы DD9.1, DD9.2, DD10.1, DD10.2, DD11.1, DD11.3 формируются импульсы управления «верхними» и «нижними» силовыми ключами.
Преобразователь реализован по схеме полного трехфазного моста, выполненного на шести транзисторах VT1–VT6. Синусоидальный выходной сигнал формируется методом широтно-импульсной модуляции. Управляется мост тремя высокочастотными драйверами типа IR2110 (ИМС DA1–DA3), способными перезаряжать затворы полевых транзисторов током до 2 А. Входное напряжение для этих драйверов должно находиться в пределах 10...15 В. При снижении напряжения ниже 10 В драйвер отказывается работать, так как он имеет встроенную схему контроля питающего напряжения. Повышение напряжения выше 15 В приводит к выходу из строя драйверов или затворов полевых транзисторов. Максимальное напряжение между затвором и истоком VT1–VT6 составляет 20 В. Драйверы DA1–DA3 имеют вход SD, при подаче на который сигнала высокого уровня они запираются, и преобразователь не работает. Это можно использовать для защиты преобразователя от перегрузки. Выходной сигнал с задающего генератора поступает на делитель частоты на 3 (DD5.1, DD6.1, DD6.2), а также на логический элемент «Исключающее ИЛИ», выполненный на микросхеме DD5.3.
Логический элемент DD5.2 в сочетании с резистором R4 и конденсатором C2 создает пусковой импульс, устанавливающий оба триггера ИМС DD6 в исходное состояние. Выходной сигнал делителя частоты на 3 (сдвинут на 180° относительно входного), проходит через две последовательно соединенные интегрирующие цепочки R6C4, R7C5 и представляет собой по форме приблизительно синусоиду с периодом в 10 мс. Выходной сигнал логического элемента DD5.3 – прямоугольный импульс длительностью 0,5 мс и периодом в 1,7 мс. Длительность импульса можно регулировать, изменяя величину резистора R5. От длительности импульса зависит величина зазора между включением силовых ключей. Это необходимо для того, чтобы силовые ключи не оказались одновременно открытыми, что опасно протеканием через них сквозных токов.
Диоды VD7–VD10 устанавливаются в том случае, когда используемые в инверторе силовые транзисторы не имеют внутреннего диода. Мощность преобразователя зависит от типа примененных полевых транзисторов. Полевые транзисторы, а также транзисторы IGBT можно устанавливать параллельно для увеличения мощности преобразователя.
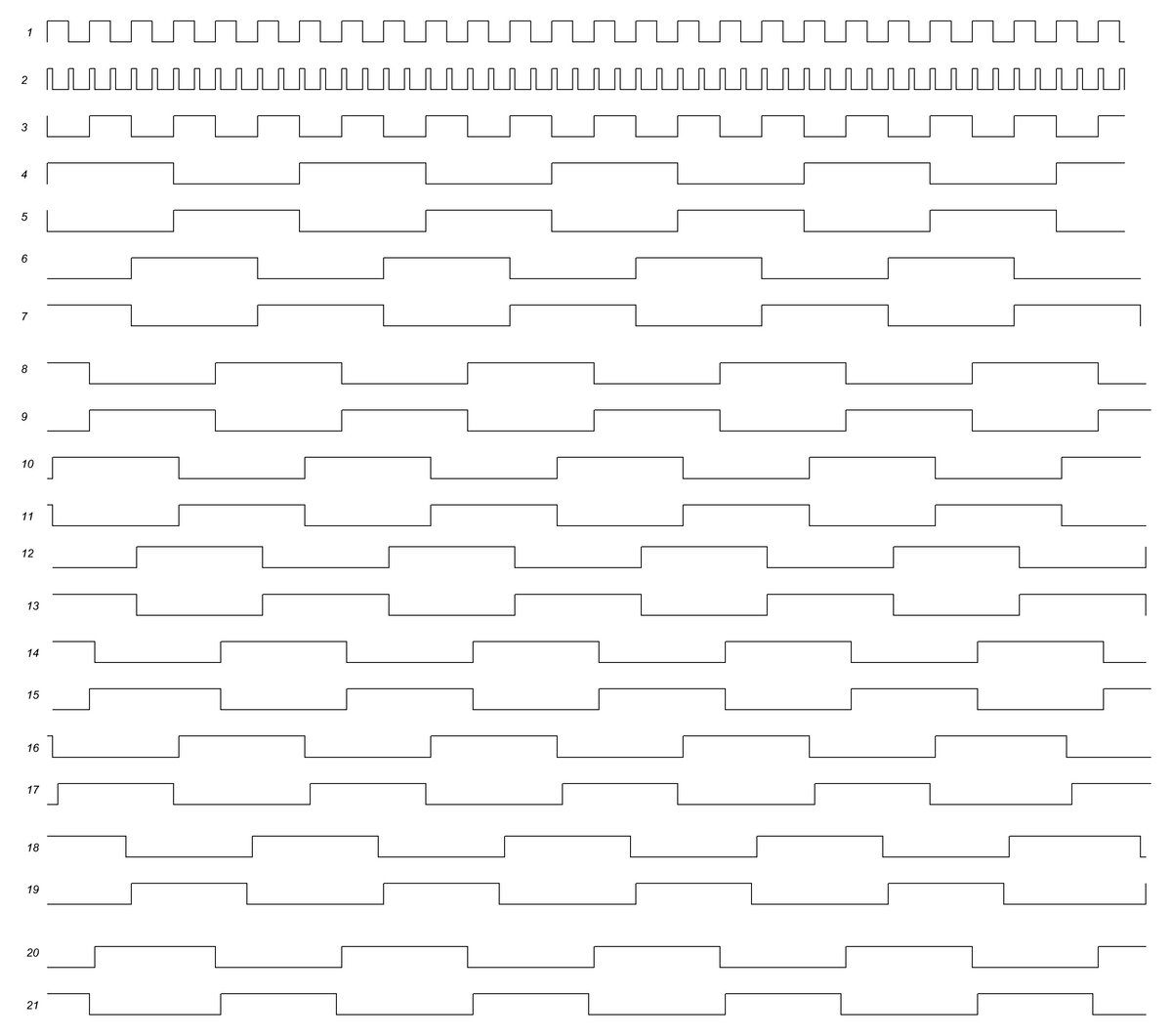
На рис.2 показаны временные диаграммы сигналов в определенных точках инвертора, а именно:
1 – тактовая частота задающего генератора;
2 – выходной сигнал логического элемента DD5.3;
3 – вывод12 D-триггера DD6.2;
4 – импульсная последовательность на выводе 9 логического элемента DD3.1;
6 – импульсная последовательность на выводе 6 логического элемента DD3.2;
8 – импульсная последовательность на выводе 10 логического элемента DD3.3. (т.е. образуется прямая трехфазная импульсная последовательность);
5, 7, 9 – инверсная трехфазная импульсная последовательность, на выводах логических элементов DD4.1–DD4.3;
10, 12, 14 – задержанная (на длительность импульса логического элемента DD5.3) прямая трехфазная импульсная последовательность;
11, 13, 15 – задержанная инверсная трехфазная импульсная последовательность;
16, 18, 20 – входные сигналы верхних ключей драйверов DA1–DA3;
17, 19, 21 – входные сигналы нижних ключей драйверов DA1–DA3;
Сигналы 6–21 показаны без высокочастотного заполнения.
Как правило, в преобразователях частоты для получения широтно-импульсной модуляции используются микропроцессоры. Мне хотелось решить эту задачу аппаратным способом. Проблема заключается в том, что широтно-импульсную модуляцию необходимо менять на каждом полупериоде синусоидального напряжения.
Силовая часть инвертора особенностей не имеет, но желательно использовать устройство для «плавного» пуска [1].
Литература
1. Калашник В. Устройство для «плавного» пуска нагрузки в электросети // Электрик. – 2011. – №4. – С.82–83.