В небольших городах, а особенно в сельской местности очень часто возникают проблемы с водоснабжением. Некоторые из этих проблем может решить устройство, описанное в этой статье. Животноводческие хозяйства ежедневно расходуют большое количество воды на поение скота, кормоприготовление, мойку доильной аппаратуры, посуды, помещений для животных. Механизированная подача воды на животноводческие фермы освобождает персонал от трудоемких работ и отвечает требованиям современного общественного животноводства.
Автоматизация водокачек обеспечивает надежное водоснабжение без дежурного персонала, улучшает использование малодебитных источников воды, так как отбор воды осуществляется более равномерно. В автоматических системах водоснабжения чаще всего используются поплавковые и электродные датчики уровня воды в резервуарах. Поплавковые датчики состоят из поплавка и узла, который преобразует его перемещение в выходной электрический сигнал. Недостаток поплавковых датчиков - наличие подвижных частей. В зимнее время из-за их обмерзания, поплавковый датчик, как правило, не работает.
Электродные датчики регистрируют изменение уровня жидкости по изменению активной проводимости междуэлектродного пространства. Электродные датчики не имеют подвижных частей, но в зимнее время они покрываются льдом, а лед, как известно, не проводит ток и электродный датчик не даёт информацию об уровне воды. Многие читатели в зимнее время наблюдали такую картину: водонапорная башня представляет собой огромную глыбу льда. Это происходит из-за того, что пока вода опустится до датчика нижнего уровня и вернется к датчику верхнего уровня, когда он уже покрылся льдом. Поэтому вода начинает течь с самого верха башни и естественно превращается в лед.
В описываемом ниже устройстве использован емкостной датчик уровня жидкости. Преимущество таких датчиков - надежность работы в самых неблагоприятных условиях, отсутствие подвижных частей и простота обслуживания. Принцип работы основан на измерении электрической емкости датчика при изменении уровня контролируемой среды вдоль оси датчика. Диапазон изменения зависит от типа датчика, его длины, характеристики измеряемой среды и монтажа датчика на резервуар. Емкостной датчик представляет собой электрод, погруженный в измеряемую среду. По конструкции электрода датчики подразделяются на стержневые, пластинчатые, тросовые и т.д. Обкладками датчика служат металлические стенки резервуара и зонд. Емкость конденсатора, образованного зондом и стенками, зависит от диэлектрической проницаемости вакуума, диэлектрической проницаемости измеряемой среды, длины датчика и уровня среды (воды). Приблизительно на метр уровня воды емкость датчика изменяется на 1000 пФ. Зонд должен быть изолирован от воды (достаточно использовать изолированный электрический провод). Если резервуар сделан не из металла, то необходимо опустить два провода, расположенных на небольшом расстоянии друг от друга. Взяв справочник по физике можно определить величину емкости такого конденсатора.
Двухпозиционный регулятор уровня воды в резервуаре работает по следующему принципу: при заполнении резервуара до верхнего порогового уровня (ВУ) насос отключается и идет расход воды до определенного нижнего уровня (НУ). Затем электронный блок включает насос, и он подает воду в резервуар до его заполнения. Далее процесс повторяется.
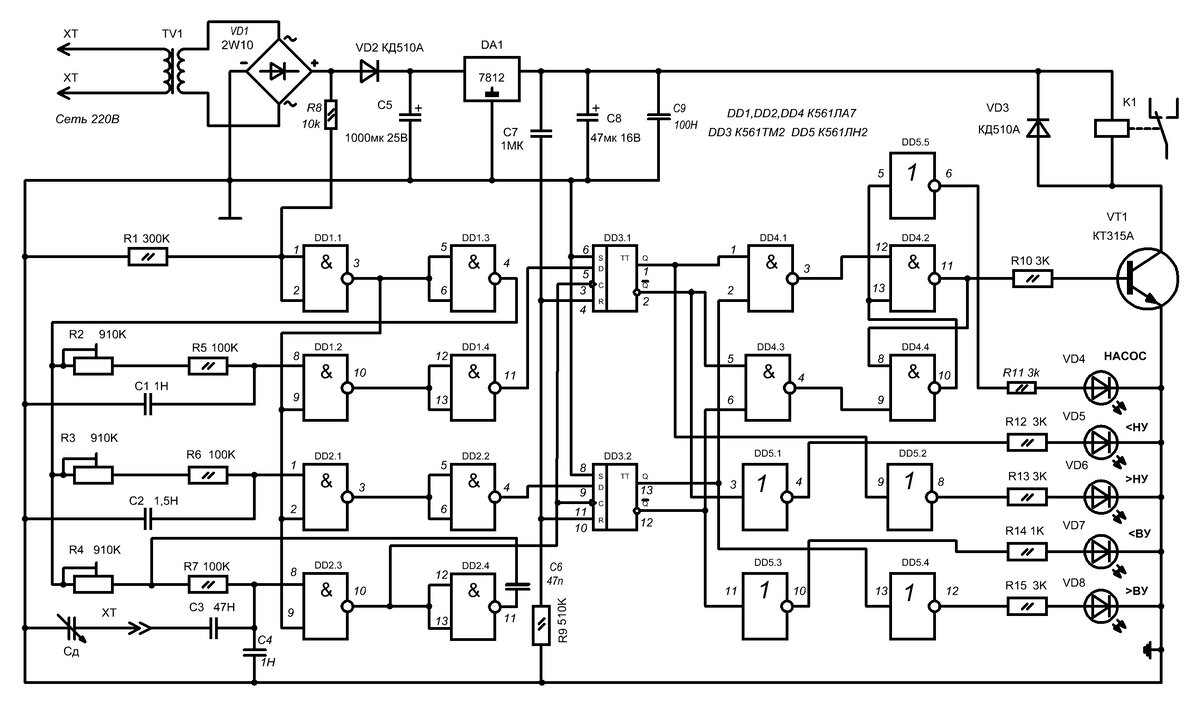
На рис.1 представлена принципиальная электрическая схема двухпозиционного регулятора уровня воды в резервуаре. Регулятор позволяет также «видеть» уровень воды в резервуаре с помощью четырех светодиодов VD5-VD8. Светодиод VD4 информирует о работе насоса. Логический элемент DD1.1 формирует положительный импульс соответствующий моменту перехода сети через нуль, который подается на один из входов логических элементов DD1.2,DD2.1,DD2.3. Инвертированный импульс с логического элемента DD1.3 поступает на три интегрирующие цепочки, которые формируют временной интервал соответствующий нижнему уровня, верхнему уровню и текущему уровню воды в резервуаре. Логические элементы DD1.2,DD2.1,DD2.3 в сочетании с интегрирующими цепочками R2,R5,C1 –(НУ) , R3,R6,C2-(ВУ), R4,R7,C3,Cд - (текущий уровень) формируют три импульса, соответствующие нижнему, верхнему и текущему уровням воды в резервуаре. Логические элементы DD1.3,DD1.4 инвертируют импульсы (НУ), (ВУ) и поступают на информационные входы D-триггеров DD3.1,DD3.2. Построечными резисторами R5-R7 устанавливаем длительности импульсов НУ, ВУ и текущего уровней (т.е. они являются задатчиками НУ, ВУ и ТУ). Выходной импульс с логического элемента DD2.3 поступает на тактовые входы обоих D-триггеров. D-триггеры DD3.1,DD3.2 выполняют функцию сравнения импульсов по длительности. Как известно сигнал с информационного входа D-триггера передается на его выход по фронту тактового импульса. Если в момент действия фронта тактового импульса (ТУ) на информационном входе будет присутствовать высокий уровень, то он будет передан на прямой выход триггера, а если низкий-то на выходе будет действовать низкий уровень. Это уровень будет сохраняться до прихода следующего тактового импульса. На логических элементах DD4.1,DD4.3 выполнен логический полусумматор, который совместно RS-триггером DD4.2,DD4.4 осуществляют двухпозиционный алгоритм регулирования. Выходной сигнал триггера с помощью транзистора VT1 включает реле К1. Контакты реле должны быть включены в цепь управление насосом. Логические элементы DD5.1-DD5.5 служат в качестве буфера питания светодиодов VD1-VD5. Желательно поставить сверхъяркие светодиоды. Светодиоды (<НУ,>ВУ), необходимо взять красного цвета, остальные зеленого. Цепочка C5,R9 устанавливают триггеры в исходное состояние при включении питания регулятора. Настройка заключается в настройке резисторов задатчиков. В начале добиваетесь свечения светодиодов (<НУ) и (<ВУ). Затем по мере наполнения резервуара регулировкой резисторов R5,R7 выставляете нижний уровень воды, таким образом, чтобы погас светодиод (<НУ) и начал светить светодиод (>НУ). При этом светодиод (<ВУ) должен светить. При достижении уровнем воды верхнего уровня регулировкой резистором R6 добиваетесь погасания светодиода (<ВУ) и свечения светодиода (>ВУ). Светодиод (НАСОС) должен погаснуть. Надо отметить, что светодиод (>ВУ) при нормальной работе регулятора светит малое время т.к. насос при достижении верхнего уровня останавливается. Но бывает так, что при ручной работе текущий уровень будет превышать установленный верхний уровень - о чем будет говорить свечение светодиода (>ВУ). При пробое изоляции датчика этот светодиод также будет светиться при любом уровне воды в резервуаре. В регуляторе использовано реле JZC-20F с катушкой в 400 Ом. Контакты реле коммутируют ток 10А. 20F с катушкой в 400 Ом. Регулятор достаточно универсальный, например, установив вместо резистора R4 термистор и заменив конденсаторы Cд, C3,С4 одним термостабильным конденсатором можно регулировать температуру. Может быть, пытливые читатели найдут ему другое применение - я буду только рад.
Так как устройство выполнено на микросхемах КМОП серии, то необходимо предпринять ряд защитных мероприятий. Часто причиной выхода аппаратуры из строя являются импульсные скачки напряжения в сети, коммутационные помехи, которые возникают при коротких замыканиях, обрывах или резких изменениях сопротивления нагрузки. Источником большого напряжения (кВ), поступающего на вход прибора может быть человек, из-за статических зарядов. Поскольку устройство соединяется с датчиком воздушной линией, то грозовые разряды также представляют большую опасность. Для защиты устройства необходимо поставить быстродействующие защитные диоды (супрессоры). Варисторы и стабилитроны нельзя ставить, так как они имеют большую емкость и низкое быстродействие. Принцип действия всех быстродействующих устройств защиты заключается в закорачивании цепи прохождения сигнала помехи и рассеивании имеющейся у неё энергии на защитном элементе. Быстродействие супрессоров составляет время в несколько пикосекунд. Отечественная промышленность не производит их, поэтому необходимо использовать импортные следующих марок Р4КЕ16А, Р6КЕ16СА, 1,5КА16СА. Они рассеивают мощность 400-600 Вт, а напряжение срабатывания у них 14,4-16 В. Причем они двунаправленные, т.е. ограничивают сигнал помехи обеих полярностей. Провод к датчику лучше использовать скрученный (витую пару), тогда помех будет меньше. Один провод идет датчику, а другой к корпусу резервуара (если он металлический) или к другому проводу, который может быть неизолированным от воды.