Всем привет! Мы продолжаем рассматривать системы автоматического управления и все идет к тому, что очень скоро нам предстоит воспользоваться такой системой для задачи автоматического удержания параметра. Все карты раскрывать не буду, но уж поверьте, это вам будет не эксперимент на столе из того что было.
Поскольку мы уже довольно давно и успешно создаем модули цифровой обработки сигнала, то у нас накопилось достаточно запчастей, чтобы сборка схема вычисления управляющего воздействия ПИ-регулятора была осуществлена без особых затруднений.
Описание регулятора на языке Verilog
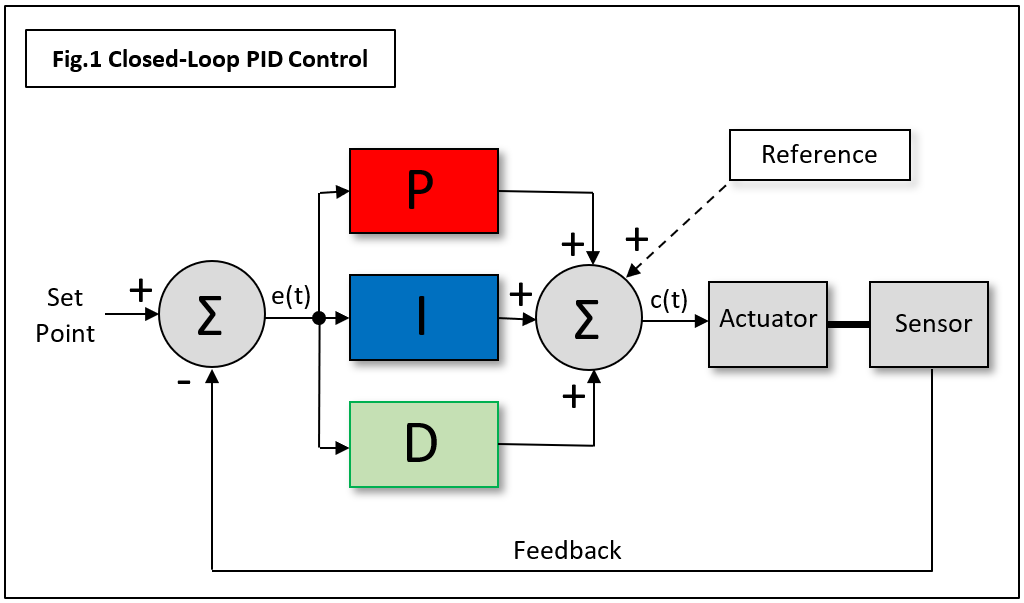
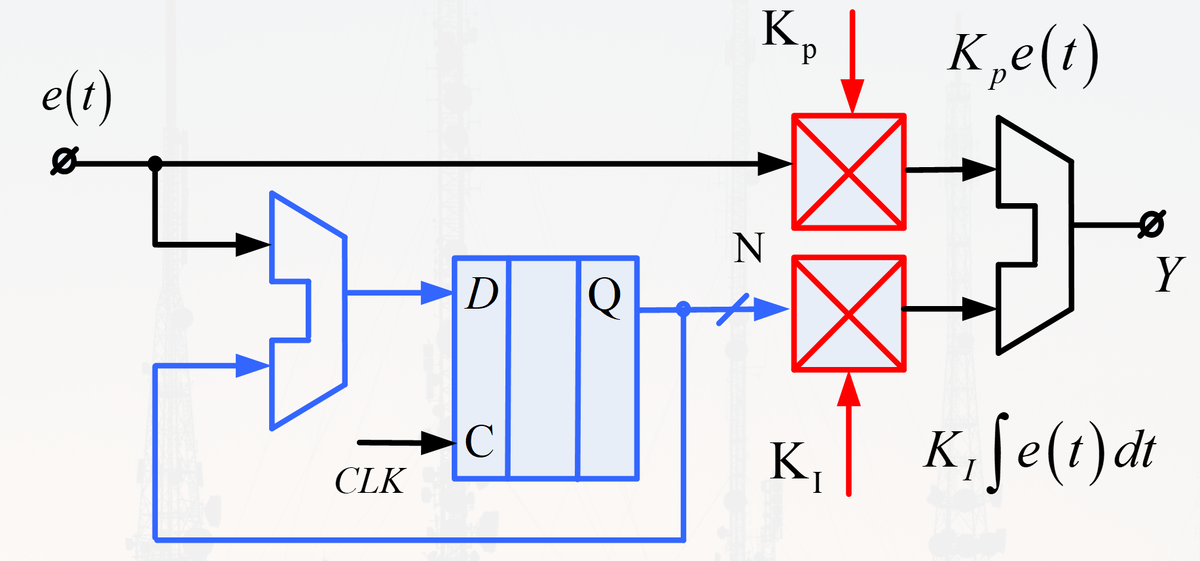
На входе схема вычислителя сигнал ошибки e(t), который поступает в пропорциональную и интегрирующую ветви. Пропорциональная часть схемы представлена одним умножителем на свой коэффициент усиления Kp. В интегрирующей ветви как ни странно находится интегратор, накапливающий постоянную составляющую ошибки управления (выделен синим цветом). На выходе интегрирующей ветви также находится умножитель на свой коэффициент усиления Ki.
Описание регулятора получилось довольно компактным только потому, что в ранних статьях об интеграторе (integrator) и умножителе (mult) уже было немало разговоров.
О том как устроены составные части регулятора можно почитать тут:
- Зачем нужен интегратор?
- Verilog. Фиксированная точка и умножитель
В результате синтеза получилась такая схема:
Ей и воспользуемся для решения задачи автоматического управления.
Поддержите статью лайком если понравилось и подпишитесь чтобы ничего не пропускать.
Также не обойдите вниманием канал на YouTube. Подписки и лайки будут приятным ответом от аудитории.