В бесколлекторных двигателях постоянного тока (BLDC) для коммутации системы необходим электронный механизм. В отличие от коллекторных двигателей постоянного тока, постоянный магнит расположен на роторе, а обмотки расположены на статоре.
В результате такого расположения, обмотки должны включаться последовательно, чтобы обеспечить плавную коммутацию.
Для того чтобы определить какие обмотки необходимо запитать, используется датчик Холла, обратная связь которого, дает понимание о текущем расположении обмотки по отношению к магниту ротора. При использовании датчика Холла производитель вынужден добавить дополнительную печатную плату и магнит, тем самым увеличив стоимость.
Кроме того, для применения сервоприводов требуется дополнительный двухканальный или 3-канальный позиционный энкодер, что еще больше повышает сложность двигательной системы бесколлекторного типа.
Эта проблема может быть решена с помощью 6-канального оптического энкодера компании Broadcom, где позиционная энкодерная и коммутационные обратные связи объединены в один модуль.
Кроме того, модуль эффективен в простоте регулировки двигателя и повышении точности переключения. В результате использования модульного решения Broadcom значительно упрощается конструкция моторной системы и её стоимость.
Бесколлекторный (бесщеточный) двигатель постоянного тока
Бесколлекторный (бесщеточный) двигатель постоянного тока (BLDC) является одним из самых популярных типов двигателей, используемых на рынке (кроме шаговых двигателей, двигателей постоянного тока и ряда других).
- В отличие от двигателей постоянного тока, обмотки статора необходимо запитывать последовательно, чтобы обеспечить плавную коммутацию в двигателе BLDC.
- Чтобы знать расположение обмотки статора по отношению к магниту ротора, необходимо иметь коммутационные и сенсорные обратные связи.
Двигатель BLDC может быть сконфигурирован на 2-фазы или 3-фазы, независимо от количества обмоток статора и количества полюсных пар, которые также настраиваются.
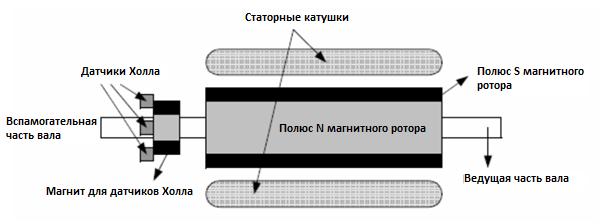
Стандартные двигатели BLDC используют датчик Холла в качестве обратной связи для определения местоположения обмоток статора по отношению к ротору. Эта информация позволяет электронике определять, какую обмотку активировать, чтобы коммутировать двигатель. Датчик Холла обычно встроен в статор или неиспользуемый конец вала двигателя BLDC.
Дополнительная печатная плата (PCB) требуется для установки датчики Холла в соответствие с магнитом ротора. Для сервоприводов необходимая обратная связь положения обеспечивается дополнительным энкодером, что значительно увеличивает сложность и стоимость всей конструкции двигателя.
Пример двигателя BLDC показан на рисунке 1.
Чтобы решить эту проблему, эквивалентные выходы датчика Холла интегрированы в энкодер, чтобы значительно снизить сложность и стоимость всей конструкции. Кроме того, это решение позволит сократить время настройки и повысить точность переключения за счет снижения гистерезиса, по сравнению с простым датчиком Холла.
Обзор 6-канального оптического энкодера
Broadcom был разработан современный дизайн 6-канального оптического энкодера, чтобы помочь производителям выпускать бесколлекторные двигатели постоянного тока (BLDC).
Оптический энкодер использует
- канал A, канал B и канал I в качестве обратной связи положения
- канал U, канал V и канал W для коммутации обратной связи датчика Холла
Все эти выходные сигналы генерируются от оптических датчиков, где количество полюс-пар может быть настроено на шаблон кодового колеса без каких-либо изменений в сложной конструкции двигателя.
Это изобретение значительно сокращает время проектирования двигателя производителя и вывод его на рынок. Кроме того, точность переключения 6-канального оптического энкодера от компании Broadcom с механической коммутации в ±1°, намного лучше, чем у простых датчиков Холла.
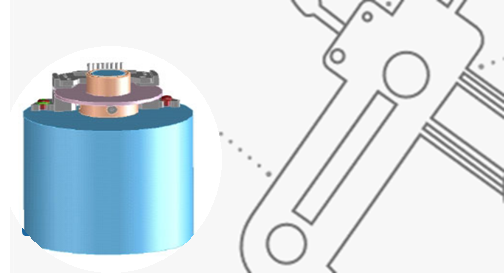
6-канальный оптический энкодер Broadcom доступен от 1000 CPR до 2500 CPR, а диаметр вала доступен от 3 мм до 10 мм. Инструмент калибровки также доступен для позиционирования 6-каналового оптического энкодера к валу двигателя.
Пример 6-канального оптического энкодера Broadcom установленного на бесколлекторном двигателе показан на рисунке 2.
Сравнение со стандартной схемой обратной связи
Стандартный двигатель BLDC использует датчик Холла для определения местоположения статора по отношению к ротору. Другими словами, выход датчика Холла связан с противо ЭДС двигателя. На рисунке 3 показана взаимосвязь между противо ЭДС двигателя и выходами датчика Холла.
Для трехфазного двигателя BLDC три датчика Холла размещаются на отдельных печатных платах, расположенных на 120 градусов друг от друга.
Стандартный датчик Холла предлагается с открытым коллектором, который требует подтягивающего резистора для каждого датчика Холла. Такая конфигурация будет еще больше увеличить закупочную ведомость компонентов, тем самым увеличивая всю стоимость конструкции двигателя. На рисунке 4 показана обычная схема с обратной связью датчиков Холла.
Для организации обратной связи двигателя BLDC с 6-канальным оптическим энкодером со встроенными выходами коммутации, необходимы только сам оптический энкодер и кодовое колесо.
На рисунке 5 показана упрощенная версия той же конструкции двигателя BLDC с 6-канальным оптическим энкодером, что и на рисунке 4.
Для сравнения, иллюстрация на рисунке 5 ясно показывает, что схема 6-канального оптического энкодера не так сложна, как схема, показанная на рисунке 4, которая использует датчики Холла.
В таблице 1 показано сравнение между закупочной ведомостью 6-канального оптического энкодера и ведомостью с датчиками Холла.
Заключение
6-канальный оптический энкодер компании Broadcom обеспечивает обратную связь для сервоприводов и обратную связь коммутации, тем самым значительно упрощает конструкцию двигателя BLDC.
По теме энкодеры на нашем канале есть публикация:
Почему оптические энкодеры необходимо внедрять в разработку нового медицинского оборудования
Подобрать решение для вашего оборудования? Отправьте запрос в форме ниже: