
В прошлой статье мы начали разбираться с системами автоматического управления и пришли к нехитрой схеме, дающей правильное значение сигнала управления на руль высоты беспилотного летательного аппарата.
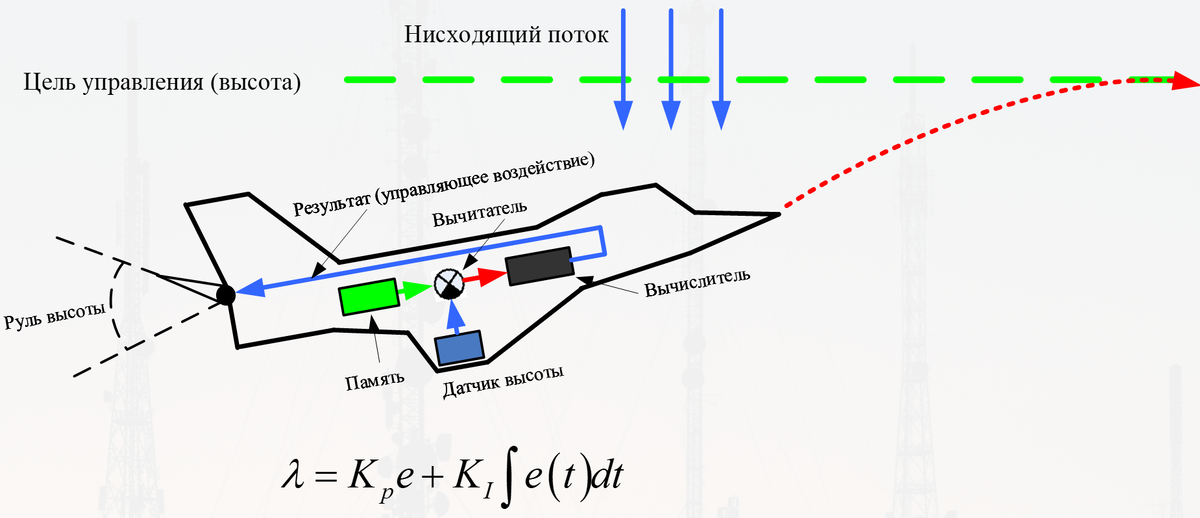
Как бы все не было описано радужно, при попытке увеличить коэффициенты усиления (Kp, Ki) в пропорциональном и интегральном звене с целью ускорения процессов управления начинаются не очень приятные моменты. Накопленное в интеграторе значение сигнала управления это весьма медленно меняющаяся инертная величина, которая в совокупности с инерцией тяжелого летательного аппарата приводит к возникновению затухающих колебаний вокруг необходимой высоты.
Когда аппарат превышает необходимую высоту, то сигнал ошибки e(t) становится отрицательным, что сразу сказывается на величине сигнала управления. Величина, накопленная в интеграторе начинает уменьшаться и только спустя какое-то время интегральное звено перестанет компенсировать пропорциональное и руль высоты повернется в нужном направлении. Как вы понимаете,
всю картину процесса пишут именно правильно подобранные коэффициенты усиления.
Несмотря на то, что колебания обязательно должны быть, они могут быть малыми и даже практически не заметными.
Что не так с PID-регулятором?
Теория и тем более практика использования регуляторов для вычисления управляющего сигнала предлагает в самом общем виде формулу, состоящую из трех компонентов.
С первыми двумя мы уже разобрались. Пропорциональная часть (P) учитывает ошибку управления в данный момент, интегрирующая часть (I) учитывает прошлые ошибки управления, а вот дифференцирующая часть (D) формулы учитывает будущие ошибки и звучит это довольно странно.
Давайте попробуем с этим разобраться. Производная сигнала ошибки по времени это изменение сигнала ошибки за небольшой промежуток времени. В том случае если ошибка нарастает, а остальные звенья не справляются из-за малости своих коэффициентов, то дифференцирующая часть добавит в общую сумму сигнала управления свою долю. А вот когда ошибка управления снижается, то дифференцирующая часть начинает вычитать сигнал управления, что при грамотной настройке коэффициентов позволяет притормозить аппарат перед самой целью управления и не дать инерции перебросить беспилотник выше нужной высоты.
PID-регуляторы нашли применение практически во всех областях техники, в том числе и выполняют свои задачи внутри квадрокоптеров. Цели управления самые разнообразные: поддержание нужной высоты, зависание аппарата в воздухе и даже следование за объектом видеосъемки.
Как можно заметить, дифференцирующее звено оказалось полезным. Но это все ровно в том случае, если в результате экспериментов удалось подобрать правильную комбинацию коэффициентов усиления.
Есть еще одно немаловажное обстоятельство, напрочь отметающее изобретение дифференцирующего звена. Как вы думаете, что будет, если на сигнал ошибки будет воздействовать шум? В этом конкретном случае это маловероятно, но все же давайте посмотрим на формулу. Любое шумовое воздействие, конечно же, негативно воздействует на систему управления.
Интегрирующему звену любые случайные выбросы сигнала ошибки совершенно безразличны.
Выбросы бывают как с положительным, так и с отрицательным знаком, что в сумме компенсируется довольно хорошо.
Пропорциональное звено реагирует больше на абсолютную величину сигнала ошибки, чем на какой-то из ее случайных выбросов, но это тоже скажется на процессе управления. А вот полнейшей катастрофой будет воздействия случайных выбросов сигнала ошибки на дифференцирующее звено алгоритма.
Производная по времени в момент выброса случайной величины имеет огромные значения. Это же тангенс угла наклонной к касательной функции, поэтому будьте готовы к условно бесконечным значениям. А чем обернутся для аппарата очень большие случайные значения сигнала управления? Думаю, такая продвинутая система управления с тремя звеньями к шуму оказалась совершенно не готова.
Вот к чему все это подводилось. В технике связи также востребованы всевозможные системы управления, а как мы все понимаем, не существуют каналов связи без шумов и помех, создающих случайные выбросы.
Вот именно из-за наличия шумов придуманная кем-то дифференцирующая часть в системах автоматического управления отправляется прямиком на свалку. Она не только не прижилась, но еще и абсолютно противопоказана.
Продолжение следует...
Поддержите статью лайком если понравилось и подпишитесь чтобы ничего не пропускать.
Также не обойдите вниманием канал на YouTube. Подписки и лайки будут приятным ответом от аудитории.