Всем привет! Недавно мы рассмотрели адаптивные системы и выяснили, что процесс адаптации, иногда выглядящий как проявление некой формы жизни представляет собой простой и гениальный алгоритм, базирующийся на несложной математике. Именно математика вдыхает в бездушные железки если не саму жизнь, то поведение, имеющее с ней некоторое сходство.
Что такое автоматика?
Сейчас мы рассмотрим устройства автоматического управления, применяющиеся практически во всей имеющейся технике и принимающие весьма разнообразные формы. В одной из самых первых статей мы классифицировали системы управления на автоматизированные, где имеется участие человека и автоматические, где в процессе управления нет участия оператора. Сегодня речь зайдет об автоматике.
Системой управления назовем набор средств и алгоритм управления подконтрольным объектом.
Необходимость внедрения автоматики зародилась давно, чем больше технических средств появлялось в жизни человека, тем больше и появлялось и систем автоматики. Например, для ограничения частоты вращения вала паровой машины был применен центробежный регулятор Уатта.
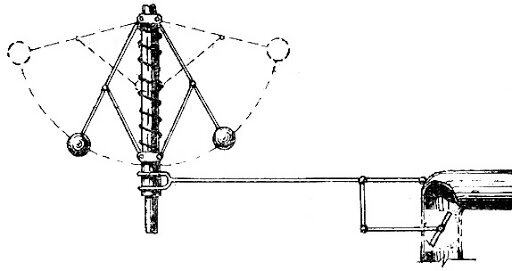
Чем выше скорость вращения грузиков, тем больше закрывается клапан подачи пара. Как уже говорилось, форм систем управления много, но мы сейчас рассмотрим их работу в электронике.
Управление в цифровых системах
Практика создания систем управления начала обрастать теорией еще в начале 20 века и именно тогда была предложена довольно простая модель ее работы. Как и в случае рассмотренных ранее адаптивных систем, в основе работы устройств лежит некоторый сигнал ошибки. В данном случае это ошибка управления.
Сигнал ошибки это разница между требуемым параметром управляемого объекта и измеренным датчиком значением параметра. На основании этой разницы вычислитель по некоторому алгоритму выдает сигнал управления для управляемого объекта (результат). Сигнал управления ведет управляемый объект в направлении нужного значения параметра. Как только значение параметра сравнивается с необходимым, сигнал ошибки становится равным нулю и вычислитель снимает с объекта управления всякое воздействие.
Сходства и различия с адаптивной системой
С одной стороны, адаптивная система упрощается, потому как слежение будет происходить за одним параметром. С другой стороны, поведение объекта управления может быть довольно сложным и простым пошаговым движением в сторону оптимального решения ничего не добиться. Сейчас посмотрим почему так происходит и что с этим можно сделать.
Управление без сноса параметра
Представим управляемый параметр системы как случайный процесс. Случайность его в том, что величина параметра совершенно произвольная. В простом случае она постоянная, а в сложном требуемая или измеренная случайная величина испытывает постоянный снос. Давайте посмотрим это на задаче поддержки высоты беспилотного летательного аппарата.
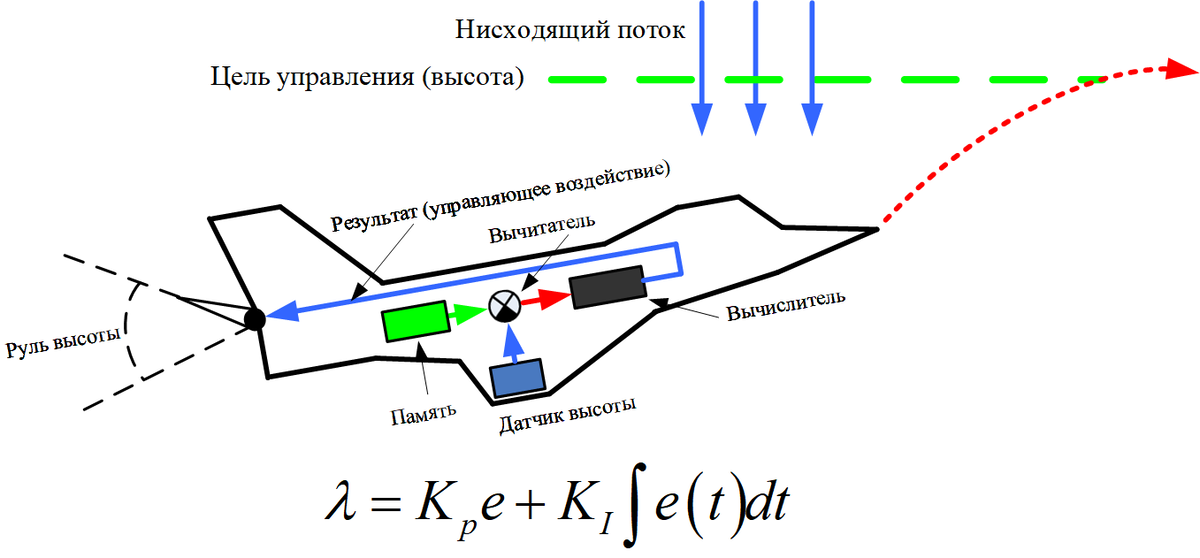
Требуемая высота полета загружена в память летательного аппарата, которая выделена блоком зеленого цвета. Эта высота поступает на один из входов вычитателя. Синий блок датчика высоты отправляет измеренную величину высоты на вычитатель, в результате чего образуется разность между необходимой и измеренной высотой, разность отмечена стрелкой красного цвета. Как вы помните, эта разность (e) называется сигналом ошибки. На основании этого сигнала вычисляется необходимая величина корректирующего воздействия лямбда на руль высоты.
Чем ближе высота аппарата к заданной, тем меньше сигнал ошибки, тем меньше и управляющее воздействие на рули. При достижении заданной высоты полета ошибка управления становится равной нулю, что убирает всякое воздействие с руля высоты.
В прошлом выпуске мы как раз разбирали почему для подобных задач очень удобно использовать сигнал коррекции пропорциональный сигналу ошибки. Это следствие выбранной функции потерь с квадратичной зависимостью от ошибки. В теории автоматического управления об этом говорится довольно подробно, но нам сейчас абсолютно не важен глубокий теоретический фундамент, просто поверьте, что все теоретические основы имеют под собой прочное основание. Коэффициент пропорциональности Kp нужен для того чтобы перевести метры разницы высоты в угол отклонения рулей, не более того.
Управление со сносом параметра
Теперь пришло время поговорить о недостаточности только лишь пропорционального управления. Наступил тот самый снос регулируемого параметра, о котором мы поговорили ранее. При нисходящем потоке воздуха все что летит начинает снижаться вместе потоком, а это ни что иное как снос параметра в самом наглядном его воплощении.
Обратите внимание, что имеющийся, с позволения сказать, алгоритм расчета управляющего воздействия на руль высоты конечно же попытается отправить аппарат вверх, но до конца это сделать не получится. В непосредственной близости от цели сигнал ошибки снизится, однако слабое отклонение руля не будет способно противостоять нисходящему потоку. В этом случае останется ошибка регулирования. Небольшая разность высот дает небольшой сигнал ошибки, который дает небольшое отклонение рулей, которое не дает дойти до нужной высоты. Такой вот замкнутый круг.
Модификация алгоритма
Увеличение коэффициента пропорциональности, конечно же, приблизит аппарат к нужной высоте, но ошибка регулирования, в любом случае, останется. Слишком большой коэффициент пропорциональности Kp также не может быть выставлен, потому как вдалеке от нужной высоты воздействия на рули могут привести к превышению максимально допустимых перегрузок.
С целью преодолеть несовершенство алгоритма в теории автоматического управления вводится более сложная модель поведения параметра, которая приводит к модификации алгоритма. Теперь в расчете управляющего воздействия лямбда участвует не только текущая ошибка, но и сумма всех прошлых ошибок.
Еще один коэффициент пропорциональности Ki не дает сделать эту сумму слишком значительной величиной, однако, на конечном этапе интеграл обладает исключительно важной функцией. Он не только добавляет воздействие на рули, что позволяет преодолеть нисходящий поток, но и оставляет это воздействие после уменьшения сигнала ошибки до нуля. Таким образом, даже при вертикальных потоках воздушных масс остаточное воздействие на рули высоты позволяют аппарату оставаться на заданной высоте. В схему вычисления управляющего воздействия на рули высоты добавляется интегратор.
Таким коротким и поверхностным получилось первое описание комплекса терминов и проблем систем автоматического управления.
Продолжение следует...
Поддержите статью лайком если понравилось и подпишитесь чтобы ничего не пропускать.
Также не обойдите вниманием канал на YouTube. Подписки и лайки будут приятным ответом от аудитории.